


基于EAKI 辨識策略的機(jī)床振動(dòng)試驗(yàn)研究
2016-9-22 來源:清華大學(xué)機(jī)械工程系等 作者:黃子凌 劉成穎 李鐵民
摘要: 機(jī)床振動(dòng)是制約機(jī)床加工精度及效率的核心因素,文章基于EAKI 策略在多臺機(jī)床上開展振動(dòng)試驗(yàn)研究。針對強(qiáng)迫振動(dòng)及自激振動(dòng)信號辨識問題,首先提出EAKI 振動(dòng)信號辨識策略; 為有效構(gòu)建振動(dòng)信號備案知識庫,提出信號特征分量提取算法; 最后在國內(nèi)外多臺數(shù)控機(jī)床上進(jìn)行了全轉(zhuǎn)速狀態(tài)下的振動(dòng)試驗(yàn)研究。試驗(yàn)結(jié)果有效地驗(yàn)證了EAKI 策略的可行性與實(shí)用性,同時(shí)為機(jī)床性能評估及設(shè)計(jì)完善提供了良好借鑒。
關(guān)鍵詞: EAKI 方法; 信號辨識; 振動(dòng)試驗(yàn); 特征提取
0 .引言
機(jī)床振動(dòng)是制約機(jī)床加工精度及效率的關(guān)鍵因素之一,其可分為強(qiáng)迫振動(dòng)及自激振動(dòng)。二者由于產(chǎn)生原因不同,對應(yīng)的抑制措施也有差異,因此對其進(jìn)行辨識分離具有重要的研究意義。
機(jī)床的強(qiáng)迫振動(dòng)是指由外激振源引起的振動(dòng)。如由機(jī)床基座引入的外界振動(dòng)、機(jī)床不平衡部件( 電機(jī)等) 或磨損部件( 齒輪和軸承等) 引起的振動(dòng)。機(jī)床自激振動(dòng)( 顫振) 往往由外作用源引發(fā)( 工件磨損點(diǎn)等) ,但由加工系統(tǒng)內(nèi)部激勵(lì)產(chǎn)生[1]。
在機(jī)床設(shè)計(jì)時(shí),強(qiáng)迫振動(dòng)就應(yīng)設(shè)法消除或避免。對于高精度機(jī)床,強(qiáng)迫振動(dòng)的影響是較小的,因此在一般研究中并未引起特別注意及重視。國內(nèi)外學(xué)者針對強(qiáng)迫振動(dòng)及自激振動(dòng)信號辨識的研究工作并不多。在對強(qiáng)迫運(yùn)動(dòng)的研究中,Kegg 等人給出了對強(qiáng)迫振動(dòng)原因的判定方法,該方法在機(jī)床試驗(yàn)或加工準(zhǔn)備過程中較為實(shí)用,但不適用于在線監(jiān)測評估; 值得注意的是,Weck[2]提出了從切削力信號的功率譜中將銑削刀齒通過頻率辨識濾除的方法,但并未系統(tǒng)性地介紹強(qiáng)迫及自激振動(dòng)的一般辨識方法。多數(shù)研究工作集中于自激振動(dòng)監(jiān)測辨識、穩(wěn)定性分析以及基于振動(dòng)信號的故障診斷領(lǐng)域。Zhang C L 等[3-4]學(xué)者對多信號的監(jiān)測能力分別進(jìn)行了實(shí)驗(yàn)分析,以選定最為適合的顫振監(jiān)測方式; Altintas 等[5]基于再生顫振模型對顫振穩(wěn)定性進(jìn)行了深入研究,在實(shí)踐上獲得良好應(yīng)用。國內(nèi)于俊一[6-9]等學(xué)者也在顫振監(jiān)測、穩(wěn)定性分析等領(lǐng)域做了大量工作,為推動(dòng)機(jī)床技術(shù)進(jìn)步作出重要貢獻(xiàn)。
然而從國內(nèi)機(jī)床的使用經(jīng)驗(yàn)來看,當(dāng)前面臨的一個(gè)突出問題是機(jī)床材料選用、設(shè)計(jì)制造以及安裝布置尚存在不足,由此產(chǎn)生的強(qiáng)迫振動(dòng)不容忽視。在機(jī)床加工過程中,強(qiáng)迫振動(dòng)的影響往往甚至?xí)幱谥鲗?dǎo)地位,因此將強(qiáng)迫及自激振動(dòng)相結(jié)合進(jìn)行研究更具有實(shí)際意義。
1. EAKI 機(jī)床振動(dòng)信號辨識策略
在實(shí)際加工過程中,從觀測到的振動(dòng)信號中往往難以區(qū)分出強(qiáng)迫振動(dòng)及自激振動(dòng)分量。然而,強(qiáng)迫振動(dòng)的不確定性較小,可通過前期實(shí)驗(yàn)等確定機(jī)床的強(qiáng)迫振動(dòng)分量,在評估機(jī)床性能的同時(shí)形成先驗(yàn)知識,以在實(shí)際加工信號中將其與自激振動(dòng)信號區(qū)分開來,達(dá)到辨識以及分別采取抑制策略的效果; 同時(shí),在加工前評估機(jī)床的強(qiáng)迫振動(dòng)信號,也有利于在前期對機(jī)床性能不斷進(jìn)行完善。
基于上述思想,提出EAKI 方法,對機(jī)床的振動(dòng)信號進(jìn)行辨識。具體包括以下步驟:
( 1) 強(qiáng)迫振動(dòng)試驗(yàn)( Experiments on forced vibration): 在空載工況下對機(jī)床振動(dòng)進(jìn)行試驗(yàn)分析,以獲取在多轉(zhuǎn)速條件下機(jī)床主軸的振動(dòng)信息。
( 2) 振動(dòng)信號分析( Analysis of forced vibration signal) 對試驗(yàn)采集到的強(qiáng)迫振動(dòng)信號進(jìn)行分析處理,旨在提取出起主導(dǎo)作用的強(qiáng)迫振動(dòng)信號特征。
( 3) 備案知識庫構(gòu)建( Knowledge Base formation) :基于信號分析處理結(jié)果,并結(jié)合相關(guān)判定規(guī)則,形成相應(yīng)振動(dòng)信號備案知識庫。
( 4) 辨識評估( Identification of vibration signal) : 基于知識庫,對實(shí)際加工過程中監(jiān)測到的振動(dòng)信號進(jìn)行對比分析,從而辨識出自激振動(dòng)分量,并對其影響程度進(jìn)行評估,識別出起主導(dǎo)作用的因素,為后續(xù)抑制方式奠定基礎(chǔ)。
在EAKI 方法中,強(qiáng)迫振動(dòng)試驗(yàn)及振動(dòng)信號分析是該方法最為重要而基礎(chǔ)的部分,也是決定該方法是否可行的關(guān)鍵,后文即通過多機(jī)床試驗(yàn)及信號特征提取算法等,探究EAKI 方法的可行性。
2 .關(guān)鍵設(shè)備及試驗(yàn)方案
根據(jù)EAKI 方法,強(qiáng)迫振動(dòng)試驗(yàn)是進(jìn)行信號辨識分析的前提。強(qiáng)迫振動(dòng)試驗(yàn)主要包含信號采集分析軟硬件設(shè)備以及試驗(yàn)機(jī)床等。
本試驗(yàn)采用實(shí)驗(yàn)室自主研發(fā)的主軸振動(dòng)測量系統(tǒng),能完成信號采集監(jiān)測、時(shí)頻域分析、狀態(tài)報(bào)警等多種功能。設(shè)備安裝及試驗(yàn)現(xiàn)場如圖1 所示。
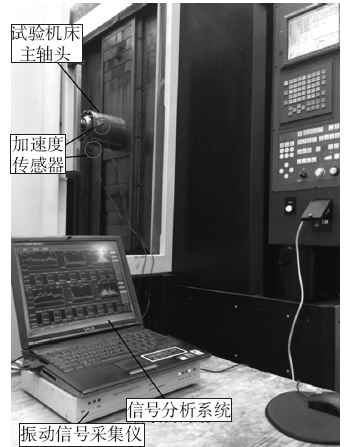
圖1 試驗(yàn)現(xiàn)場圖
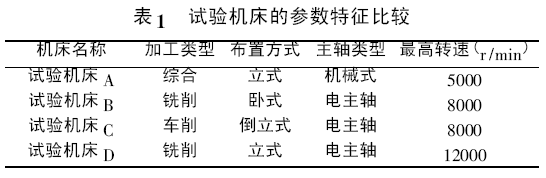
為綜合全面地驗(yàn)證EAKI 方法并分析比較各機(jī)床的差異性,選取了四臺機(jī)床作為試驗(yàn)對象,基本涵蓋了國內(nèi)外典型機(jī)床類型( 其中D 為德國機(jī)床) 。各機(jī)床的主要參數(shù)如表1所示 。
具體試驗(yàn)過程如下:
( 1) 安裝試驗(yàn)設(shè)備。試驗(yàn)采用兩支ICP 加速度傳感器,安裝在主軸頭處,分置于X、Y 方向。
( 2) 設(shè)置試驗(yàn)參數(shù)。主要包含測量頻次、采集頻率、信號耦合方式、濾波方式以及信號對應(yīng)的測量轉(zhuǎn)速等信息。
( 3) 試驗(yàn)信號采集。設(shè)定數(shù)控機(jī)床運(yùn)轉(zhuǎn)至所需轉(zhuǎn)速,待信號穩(wěn)定之后實(shí)時(shí)采集并存儲。
( 4) 改變轉(zhuǎn)速,重復(fù)采集試驗(yàn)。根據(jù)每臺機(jī)床的額定轉(zhuǎn)速或最高轉(zhuǎn)速,選取一定的轉(zhuǎn)速間隔,分別測定在不同轉(zhuǎn)速情形下的振動(dòng)信號。
3 .振動(dòng)信號特征分量提取算法
試驗(yàn)采集到的加速度信號描述了機(jī)床主軸在相應(yīng)轉(zhuǎn)速下的振動(dòng)特征。信號分析的目的在于獲取該轉(zhuǎn)速下強(qiáng)迫振動(dòng)特征分量信息,該特征分量包括頻率及信號幅值等信息。本文提出特征分量提取算法如圖2 所示。
在進(jìn)行信號分析前,已對試驗(yàn)機(jī)床在各轉(zhuǎn)速條件·44· 組合機(jī)床與自動(dòng)化加工技術(shù)第2 期
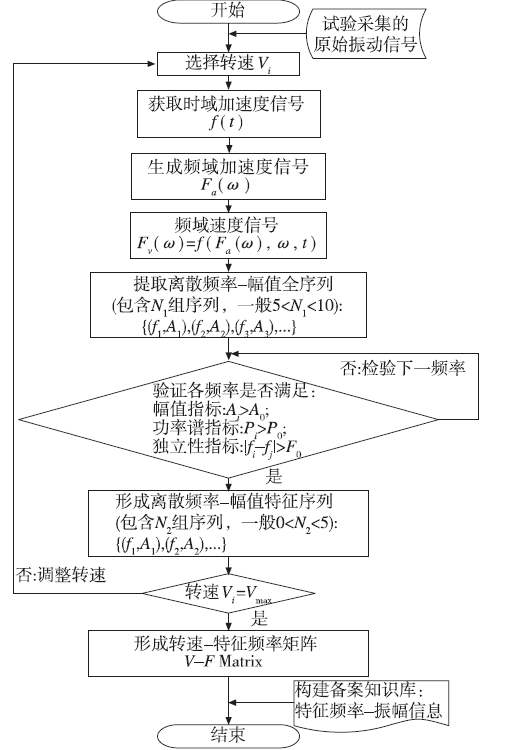
圖2 振動(dòng)信號特征分量提取算法
在進(jìn)行信號分析前,已對試驗(yàn)機(jī)床在各轉(zhuǎn)速條件下的振動(dòng)信號進(jìn)行了采集存儲。原始信號是加速度傳感器輸出的電壓時(shí)域信號f( t) ,經(jīng)傅里葉變換等算法處理后,易于生成頻域信號。加速度信號Fa( t) 在反映信號瞬態(tài)變化時(shí)較為有效,但在描述強(qiáng)迫振動(dòng)源頻率特征時(shí),不能對各頻率下振動(dòng)信號的能量分布進(jìn)行很好的區(qū)分; 經(jīng)處理獲取的速度信號Fv( t) ,能夠更好地對振動(dòng)特征進(jìn)行描述。以試驗(yàn)機(jī)床A 在5500r /min時(shí)的振動(dòng)信號為例,圖3、圖4、圖5 分別描述了時(shí)域加速度信號、頻域加速度信號及頻域速度信號特征。
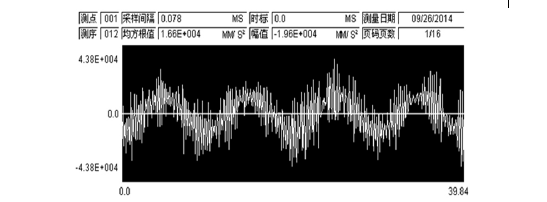
圖3 時(shí)域加速度振動(dòng)信號特征
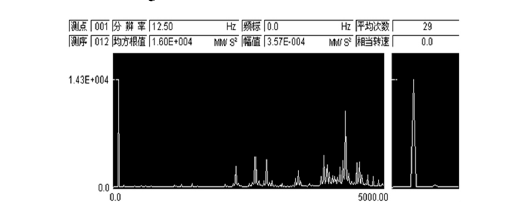
圖4 頻域加速度振動(dòng)信號特征
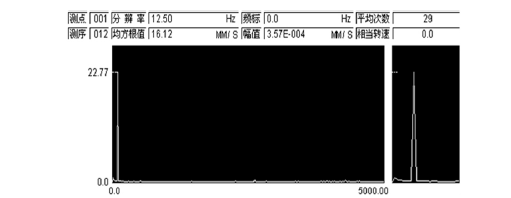
圖5 頻域速度振動(dòng)信號特征
經(jīng)處理得到的頻域速度信號具有明顯的峰谷特征,可以用頻率-幅值序列來描述每一振動(dòng)信號的頻率特性,幅值反映出該頻率基準(zhǔn)信號的振動(dòng)烈度。通常情況下,可分離出5 ~ 10 組頻率-幅值序列,以此來近似表征該轉(zhuǎn)速情況下的振動(dòng)信號。
初步分離提取出的頻率-幅值序列不能直接用于進(jìn)行后續(xù)分析,因其包含較多的冗余或無效信息。為此,需對該序列進(jìn)行進(jìn)一步地篩選過濾。考慮到信號分離的目的,主要采用三個(gè)指標(biāo)來對頻率-幅值序列進(jìn)行篩選,分別為幅值指標(biāo)、功率譜指標(biāo)以及獨(dú)立性指標(biāo)。幅值指標(biāo)及功率譜指標(biāo)用來表征基準(zhǔn)信號的烈度及功率密度,其中幅值指標(biāo)最為直觀,對于較低幅值的序列予以過濾,幅值閾值A(chǔ)0參照ISO2372 旋轉(zhuǎn)機(jī)械振動(dòng)烈度標(biāo)準(zhǔn)進(jìn)行設(shè)定,為保證信息完整,此處選取0.1
mm/s。獨(dú)立性指標(biāo)用來對頻率對應(yīng)的振動(dòng)源的獨(dú)立性關(guān)系進(jìn)行表征。由于采樣頻率限制及信號處理時(shí)分辨率制約,頻率序列會(huì)出現(xiàn)頻率接近的情況。為更準(zhǔn)確真實(shí)地表征信號對應(yīng)的強(qiáng)迫振動(dòng)源,將頻率值相近的序列對進(jìn)行合并。用頻率間距值F0 來刻畫各序列對之間的獨(dú)立性關(guān)系,根據(jù)經(jīng)驗(yàn),采取5Hz 或10Hz 作為間距閾值。
對所有轉(zhuǎn)速下的振動(dòng)信號按照上述方法進(jìn)行處理后,便可得到轉(zhuǎn)速-特征頻率矩陣。以試驗(yàn)機(jī)床D 為例,經(jīng)上述流程得到的典型轉(zhuǎn)速-特征頻率矩陣如表2所示。
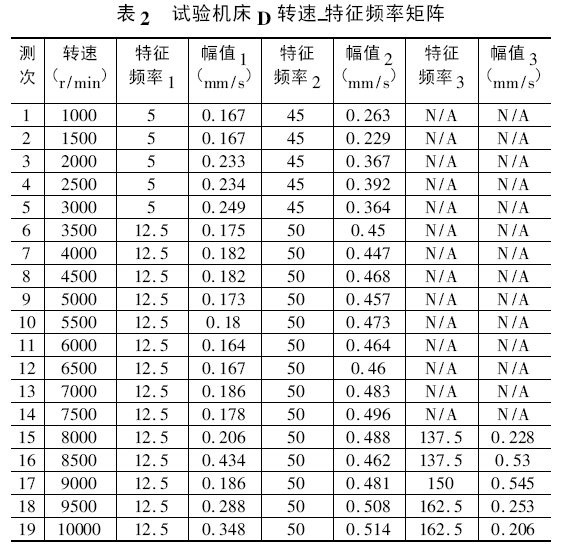
對其他機(jī)床進(jìn)行試驗(yàn)分析得到與此相近的結(jié)果,該結(jié)果作為信號分析的輸出成果,形成備案知識庫。
4. EAKI 策略有效性分析
經(jīng)上述算法得到振動(dòng)特征分量信息,須對該結(jié)果進(jìn)行分析,以驗(yàn)證EAKI 方法的可行性與有效性。驗(yàn)證的關(guān)鍵在于通過本次試驗(yàn)及信號分析能否觀察到穩(wěn)定存在的強(qiáng)迫振動(dòng)源,同時(shí)需驗(yàn)證該類型強(qiáng)迫振動(dòng)是否產(chǎn)生重要影響。機(jī)床強(qiáng)迫振動(dòng)按激振源類型可分為兩類,一類由自身回轉(zhuǎn)引起,一類由外激振源引起。下面分別進(jìn)行分析研究。
4. 1 機(jī)床主軸回轉(zhuǎn)對應(yīng)的強(qiáng)迫振動(dòng)分析
主軸自身回轉(zhuǎn)形成的強(qiáng)迫振動(dòng)激勵(lì)是重要而的強(qiáng)迫振動(dòng)激振源,其對應(yīng)的頻率可稱之為轉(zhuǎn)速頻率。理論轉(zhuǎn)速頻率與轉(zhuǎn)速正相關(guān),即f = n /60。
將試驗(yàn)測定的強(qiáng)迫振動(dòng)轉(zhuǎn)速頻率與理論強(qiáng)迫振動(dòng)轉(zhuǎn)速頻率進(jìn)行對比,如圖6 所示。
由圖6 分析發(fā)現(xiàn),各機(jī)床理論轉(zhuǎn)速頻率與實(shí)際監(jiān)測出的振動(dòng)頻率吻合度很高,反映出機(jī)床回轉(zhuǎn)形成的強(qiáng)迫振動(dòng)不容忽視,同時(shí)也驗(yàn)證了該監(jiān)測方法以及信號特征提取算法的有效性。
另一方面,轉(zhuǎn)速頻率對應(yīng)的強(qiáng)迫振動(dòng)對各機(jī)床產(chǎn)生的影響各不相同。首先,該類型強(qiáng)迫振動(dòng)產(chǎn)生顯著影響的時(shí)刻不同。試驗(yàn)機(jī)床A 從最低轉(zhuǎn)速500r /min時(shí)便可明顯觀測出轉(zhuǎn)速頻率造成的影響,試驗(yàn)機(jī)床B、C、D 分別在5200r /min、3300r /min 及8000r /min 時(shí)方可觀測到轉(zhuǎn)速頻率造成影響。其次,各機(jī)床回轉(zhuǎn)型強(qiáng)迫振動(dòng)烈度也各不相同,這將在4. 3 節(jié)進(jìn)行分析。
綜上分析可得出,試驗(yàn)有效地驗(yàn)證了回轉(zhuǎn)型強(qiáng)迫振動(dòng)廣泛存在于各機(jī)床中,往往對機(jī)床產(chǎn)生較大影響,因此可將其作為典型強(qiáng)迫振動(dòng)頻率予以備案,形成知識庫中的重要知識。
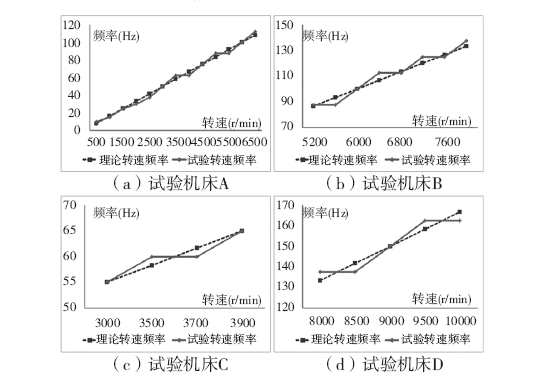
圖6 各機(jī)床理論與試驗(yàn)轉(zhuǎn)速頻率對應(yīng)關(guān)系
4. 2 其他外激振源強(qiáng)迫振動(dòng)分析
除轉(zhuǎn)速頻率之外,試驗(yàn)還發(fā)現(xiàn),各機(jī)床普遍存在其他一些可持續(xù)監(jiān)測到的強(qiáng)迫振動(dòng)頻率,剔除轉(zhuǎn)速頻率之后,每種轉(zhuǎn)速下對應(yīng)監(jiān)測到的強(qiáng)迫振動(dòng)頻率如圖7所示。
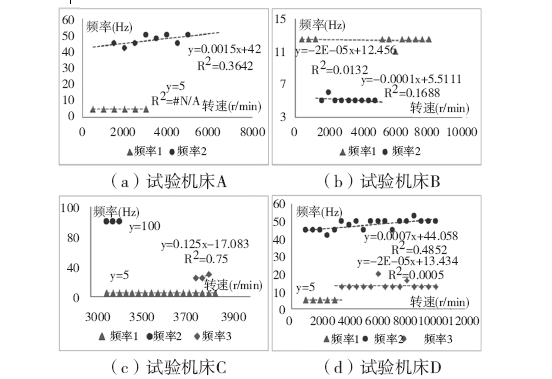
圖7 各機(jī)床外激振源強(qiáng)迫振動(dòng)頻率
由圖7 分析得出,各機(jī)床在一定轉(zhuǎn)速范圍內(nèi)均可觀測出一些典型外強(qiáng)迫振動(dòng)頻率。機(jī)床A 在低速范圍內(nèi)監(jiān)測出5Hz 及42Hz 強(qiáng)迫振動(dòng)信號; 試驗(yàn)機(jī)床B在0 ~ 1000r /min 及5000 ~ 8000r /min 的范圍內(nèi)監(jiān)測出較為穩(wěn)定的頻率為12. 5Hz 的振動(dòng)信號,在1000 ~5000r /min 的范圍內(nèi)監(jiān)測出頻率為5Hz 的振動(dòng)信號;試驗(yàn)機(jī)床C 在全轉(zhuǎn)速范圍內(nèi)均監(jiān)測出頻率為5Hz 的振動(dòng)信號,在低速范圍下還監(jiān)測出較高頻率的振動(dòng)信號; 試驗(yàn)機(jī)床D 在各個(gè)轉(zhuǎn)速下均監(jiān)測出至少兩種較為穩(wěn)定的振動(dòng)信號,分別為10Hz 及45Hz 左右。
上述結(jié)果表明基于EAKI 策略能夠有效識別出各機(jī)床在全轉(zhuǎn)速范圍內(nèi)存在的典型外激振源強(qiáng)迫振動(dòng)類型; 同時(shí)由于工況環(huán)境不同,外激振強(qiáng)迫振動(dòng)的分布也有差異。
4. 3 各典型強(qiáng)迫振動(dòng)幅值分析
本試驗(yàn)除監(jiān)測備案各機(jī)床典型強(qiáng)迫振動(dòng)頻率外,還可對各機(jī)床各類強(qiáng)迫振動(dòng)的幅值進(jìn)行分析,以更全面地表征機(jī)床強(qiáng)迫振動(dòng)狀態(tài)。結(jié)果如圖8 所示。
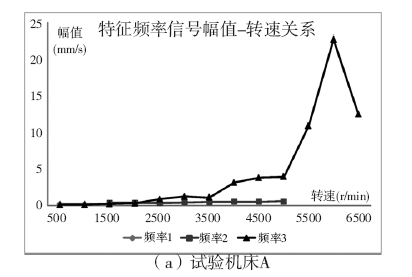
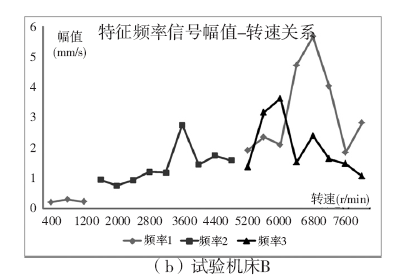
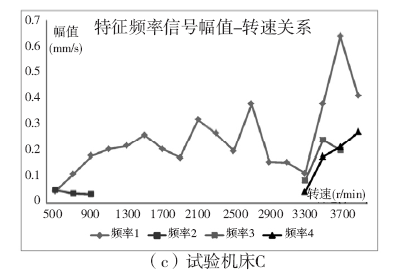
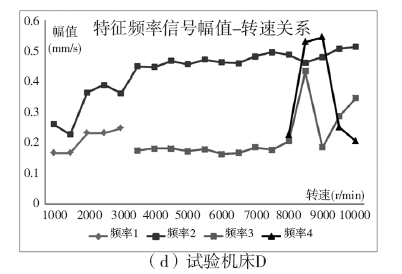
圖8 各機(jī)床典型強(qiáng)迫振動(dòng)幅值-轉(zhuǎn)速關(guān)系
根據(jù)4. 2 節(jié)的分析,回轉(zhuǎn)型強(qiáng)迫振動(dòng)是一類典型振動(dòng)形式,圖8 中機(jī)床A、B 的頻率3、機(jī)床C、D 的頻率4 分別對應(yīng)該類強(qiáng)迫振動(dòng)在全轉(zhuǎn)速情形下的振動(dòng)幅值。圖8 反映出: 第一,各機(jī)床強(qiáng)迫振動(dòng)的主導(dǎo)類型不同。對于機(jī)床A,回轉(zhuǎn)型強(qiáng)迫振動(dòng)在全轉(zhuǎn)速范圍內(nèi)均處于主導(dǎo)地位,對于機(jī)床B、C、D,不同轉(zhuǎn)速范圍內(nèi)起主導(dǎo)作用的強(qiáng)迫振動(dòng)類型不同; 第二,各強(qiáng)迫振動(dòng)的影響程度不同,對應(yīng)機(jī)床加工精度也有差異。機(jī)床A 回轉(zhuǎn)型強(qiáng)迫振動(dòng)幅值達(dá)20mm/s,對機(jī)床C、D 而言,在加工范圍內(nèi)強(qiáng)迫振動(dòng)的幅值均小于1mm/s。
由上述結(jié)果可得出,依據(jù)EAKI 策略能夠有效監(jiān)測各機(jī)床強(qiáng)迫振動(dòng)類型、幅值及影響范圍,可綜合全面地反映機(jī)床強(qiáng)迫振動(dòng)狀態(tài),進(jìn)而為針對每臺機(jī)床構(gòu)建強(qiáng)迫振動(dòng)信號知識庫形成良好基礎(chǔ); 同時(shí)各機(jī)床強(qiáng)迫振動(dòng)形式各異也反映了采用EAKI 方法進(jìn)行振動(dòng)辨識的必要性。
圖12 試驗(yàn)振動(dòng)監(jiān)控界面
4. 4數(shù)據(jù)處理軟件
本測控系統(tǒng)的數(shù)據(jù)處理軟件采用Access 數(shù)據(jù)庫設(shè)計(jì)了滾珠絲杠副可靠性信息數(shù)據(jù)庫以及數(shù)據(jù)庫管理軟件[10],用來保存試驗(yàn)過程中的原始數(shù)據(jù)、數(shù)據(jù)分析結(jié)果,能很好的幫助試驗(yàn)人員完成試驗(yàn)。
5.試驗(yàn)臺設(shè)計(jì)成果
如圖13 所示,為滾珠絲杠副可靠性試驗(yàn)臺,在機(jī)械結(jié)構(gòu)的基礎(chǔ)上,運(yùn)用上文所設(shè)計(jì)的測控系統(tǒng),試驗(yàn)臺面已經(jīng)可以模擬實(shí)際工況的往復(fù)運(yùn)轉(zhuǎn)。加載系統(tǒng)最大加載力為2t,拖動(dòng)電機(jī)最高轉(zhuǎn)速3000r /min,各傳感器信號正常,能很好的完成試驗(yàn)的要求。

圖13 試驗(yàn)臺整體實(shí)物圖
6.結(jié)束語
本文針對滾珠絲杠副可靠性試驗(yàn)臺所需要實(shí)現(xiàn)的功能問題,對其測控系統(tǒng)進(jìn)行了研究。結(jié)合試驗(yàn)裝置,提出了試驗(yàn)臺測控系統(tǒng)的設(shè)計(jì)方案,用以模擬實(shí)際工況下,被測絲杠的運(yùn)轉(zhuǎn)以及參數(shù)的檢測功能。本文提出的滾珠絲杠副測控系統(tǒng)的設(shè)計(jì)方案,有利于完成絲杠的可靠性試驗(yàn),為滾珠絲杠副可靠性的參數(shù)分析提供試驗(yàn)基礎(chǔ)。
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點(diǎn)
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年6月 新能源汽車銷量情況
- 2025年6月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年6月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年6月 軸承出口情況
- 2025年6月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年6月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況
博文選萃
| 更多
- 機(jī)械加工過程圖示
- 判斷一臺加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢
- 國產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時(shí)代,少談點(diǎn)智造,多談點(diǎn)制造
- 現(xiàn)實(shí)面前,國人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計(jì)
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別