機(jī)床")



基于六維力傳感器的工業(yè)機(jī)器人末端負(fù)載受力感知研究
2018-8-24 來源:轉(zhuǎn)載 作者: 張立建 胡瑞欽 易旺民
摘 要: 針對(duì)工業(yè)機(jī)器人末端負(fù)載與外界環(huán)境接觸力的感知需求, 在機(jī)器人法蘭與負(fù)載之間設(shè)置六維力傳感器, 并研究一套標(biāo)定與計(jì)算方法, 綜合考慮負(fù)載重力作用、傳感器零點(diǎn)、機(jī)器人安裝傾角等因素, 利用不少于 3 個(gè)機(jī)器人姿態(tài)下的力傳感器數(shù)據(jù), 可求得傳感器零點(diǎn)、機(jī)器人安裝傾角、負(fù)載重力大小、負(fù)載重心坐標(biāo)等參數(shù), 進(jìn)一步可消除傳感器零點(diǎn)及負(fù)載重力對(duì)受力感知的影響, 精確得到機(jī)器人末端負(fù)載所受的外部作用力與力矩. 實(shí)驗(yàn)得到對(duì)于重量從 320 N 到 1 917 N 的負(fù)載, 在靜態(tài)條件下, 感知外力的誤差在負(fù)載重力的 0.28 % 以內(nèi), 感知外力矩的誤差在負(fù)載對(duì)傳感器力矩的 0.59 % 以內(nèi).
關(guān)鍵詞 : 受力感知, 重力補(bǔ)償, 零點(diǎn)標(biāo)定, 六維力傳感器, 工業(yè)機(jī)器人
引用格式 張立建, 胡瑞欽, 易旺民. 基于六維力傳感器的工業(yè)機(jī)器人末端負(fù)載受力感知研究. 自動(dòng)化學(xué)報(bào), 2017, 43(3):439−447
在加工、裝配等工業(yè)機(jī)器人的應(yīng)用中, 機(jī)器人末端工具或工件與外界環(huán)境的接觸力需要被精確地感知, 控制系統(tǒng)據(jù)此修正機(jī)器人的運(yùn)動(dòng), 才能保證作業(yè)的柔順性. 在醫(yī)用手術(shù)機(jī)器人的操作中, 也需要實(shí)時(shí)精確反饋手術(shù)工具與外界的接觸力, 保證手術(shù)過程的安全. 對(duì)機(jī)器人末端負(fù)載受力的精確感知是進(jìn)行機(jī)器人柔順控制與安全保障的基礎(chǔ).在現(xiàn)有應(yīng)用中, 通常在工業(yè)機(jī)器人腕部與末端負(fù)載之間安裝六維力傳感器, 用于機(jī)器人的力反饋控制[2−5]. 六維力傳感器能夠測(cè)量空間任意力系中的三維正交力 (Fx, Fy, Fz) 和三維正交力矩 (Mx,My, Mz)[6]. 在靜態(tài)條件下, 機(jī)器人腕部六維力傳感器測(cè)得的力與力矩?cái)?shù)據(jù)由三部分組成, 即: 1) 傳感器自身系統(tǒng)誤差; 2) 負(fù)載重力作用; 3) 負(fù)載所受外部接觸力. 若要得到負(fù)載所受外部接觸力, 需要消除傳感器系統(tǒng)誤差、負(fù)載重力作用兩方面的影響. 對(duì)于機(jī)器人運(yùn)動(dòng)帶來的慣性力, 本文暫不考慮, 實(shí)際在機(jī)器人慢速運(yùn)動(dòng)中, 慣性力的影響可忽略.
傳感器自身系統(tǒng)誤差方面, 六維力傳感器在空載狀態(tài)下的讀數(shù)并不為零, 本文假定傳感器自身的系統(tǒng)誤差為常數(shù), 并稱之作 “零點(diǎn)”. 六維力傳感器在安裝負(fù)載后, 負(fù)載與傳感器間的緊固安裝方式及緊固程度也會(huì)對(duì)傳感器零點(diǎn)造成影響, 因此傳感器零點(diǎn)無法在傳感器空載時(shí)準(zhǔn)確得到, 對(duì)于零點(diǎn)的測(cè)定必須在負(fù)載安裝的條件下進(jìn)行.負(fù)載重力影響方面, 在機(jī)器人運(yùn)動(dòng)過程中, 負(fù)載姿態(tài)隨之改變, 而重力方向始終豎直向下, 因此負(fù)載重力對(duì)六維力傳感器數(shù)據(jù)的影響隨機(jī)器人的運(yùn)動(dòng)不斷變化, 對(duì)于負(fù)載重力影響的消除需要根據(jù)當(dāng)前機(jī)器人姿態(tài)實(shí)時(shí)進(jìn)行.
在傳感器零點(diǎn)的補(bǔ)償方面, 文獻(xiàn) [8 – 10] 調(diào)整機(jī)器人至一系列特定姿態(tài), 部分姿態(tài)中重力對(duì)傳感器某一測(cè)量分量的作用可相互抵消, 進(jìn)而綜合對(duì)應(yīng)姿態(tài)的傳感器數(shù)據(jù)可消除重力影響, 求得傳感器零點(diǎn).在負(fù)載重力補(bǔ)償方面, 文獻(xiàn) [2, 4, 11 – 14] 采用已知重量與重心位置的負(fù)載, 根據(jù)機(jī)器人姿態(tài)實(shí)時(shí)計(jì)算重力的影響, 消除了重力對(duì)六維力傳感器力與力矩值的影響. 一般情況下負(fù)載的重量、重心位置并不已知, 需要在線測(cè)定. 文獻(xiàn) [15 – 19] 默認(rèn)機(jī)器人基座標(biāo)系 Z 軸與重力方向相同, 進(jìn)而調(diào)整機(jī)器人使力傳感器到達(dá)特定姿態(tài), 直接得到負(fù)載重力大小,并通過變化機(jī)器人姿態(tài)標(biāo)定傳感器的安裝角度, 文獻(xiàn) [19] 進(jìn)一步按照力與力矩關(guān)系解得負(fù)載重心位置, 以此換算消除負(fù)載重力對(duì)傳感器力矩測(cè)量的影響. 文獻(xiàn) [8] 利用傳感器數(shù)據(jù)及力與力矩的關(guān)系, 采用最小二乘法求解負(fù)載重力大小及重心位置. 上述文獻(xiàn) [2, 4, 8, 11 – 19] 均默認(rèn)機(jī)器人基座標(biāo)系 Z 軸與重力方向相同, 但實(shí)際中工業(yè)機(jī)器人的安裝并不針對(duì)重力方向進(jìn)行特殊設(shè)置, 機(jī)器人基座標(biāo)系 Z 軸與重力方向往往存在偏角, 上述文獻(xiàn)中的重力補(bǔ)償算法未考慮此方面的誤差. 文獻(xiàn) [5] 在重力補(bǔ)償中考慮了機(jī)器人的安裝姿態(tài), 采用最小二乘法求得了機(jī)器人安裝傾角、負(fù)載重力大小及重心坐標(biāo), 對(duì)于重量為24.5 N 的負(fù)載, 消除負(fù)載重力作用后, 感知外力的最大誤差小于 1 N, 但文獻(xiàn) [5] 沒有考慮傳感器的零點(diǎn)問題.
綜上所述, 已有對(duì)工業(yè)機(jī)器人腕部力傳感器負(fù)載受力感知的研究中, 傳感器安裝角度通過標(biāo)定計(jì)算得到, 傳感器零點(diǎn)通過調(diào)整機(jī)器人至一系列特殊姿態(tài)進(jìn)行測(cè)定, 而機(jī)器人安裝傾角、負(fù)載重力大小及重心坐標(biāo)則利用不同姿態(tài)下的傳感器數(shù)據(jù)通過最小二乘法求得.
本文研究一種工業(yè)機(jī)器人腕部力傳感器負(fù)載受力感知方法, 與已有方法不同, 本文方法在通過機(jī)械定位保證傳感器安裝角度的基礎(chǔ)上, 利用不少于 3個(gè)機(jī)器人一般姿態(tài)下的傳感器數(shù)據(jù), 采用最小二乘法一次求得傳感器零點(diǎn)、機(jī)器人安裝傾角、負(fù)載重力大小、負(fù)載重心坐標(biāo)等參數(shù), 進(jìn)而消除傳感器零點(diǎn)及負(fù)載重力對(duì)受力感知的影響, 精確得到機(jī)器人末端負(fù)載所受的外部力與力矩?cái)?shù)據(jù).
1 、計(jì)算模型建立
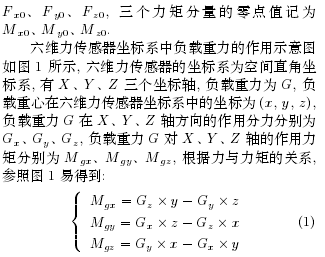
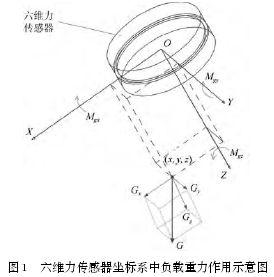
1.1 六維力傳感器力與力矩的關(guān)系
將六維力傳感器三個(gè)力分量的零點(diǎn)值記為




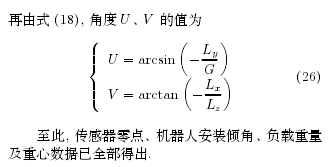

式 (28) 和式 (29) 即完成了對(duì)傳感器零點(diǎn)及負(fù)載重力影響的補(bǔ)償, 得到了負(fù)載所受的外部力與力矩.2 外力感知實(shí)驗(yàn)2.1 實(shí)驗(yàn)條件實(shí)驗(yàn)采用 KUKA 公司的 KR210 機(jī)器人, 其主要參數(shù)見表 1. 六維力傳感器采用 ATI 公司的Omega190 型傳感器, 其測(cè)量范圍及精度參數(shù)見表2.
表 1 KR210 機(jī)器人性能參數(shù)
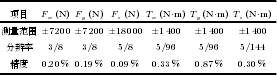
表 2 Omega190 技術(shù)參數(shù)
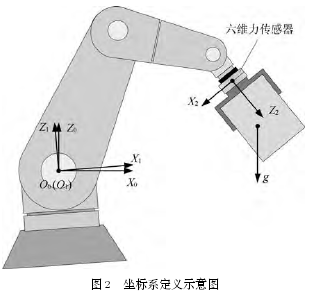
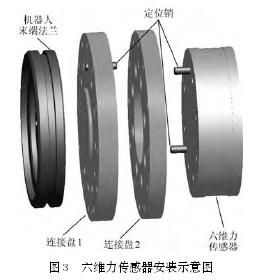
六維力傳感器在機(jī)器人末端法蘭的安裝方式如圖 3 所示, 傳感器自身的 2 個(gè)定位銷孔通過兩個(gè)定位銷與連接盤 2 實(shí)現(xiàn)定位, 連接盤 2 的中心圓孔通過連接盤 1 兩側(cè)中心的圓形凸臺(tái)與機(jī)器人法蘭中心的圓形凹腔實(shí)現(xiàn)中心定位, 連接盤 2 又通過穿過連接盤 1 的定位銷與機(jī)器人法蘭銷孔實(shí)現(xiàn)方向定位.這樣, 連接盤 1、2 兩側(cè)安裝面的平行度保證了傳感器安裝面與機(jī)器人法蘭安裝面的平行, 確保傳感器Z 軸與機(jī)器人工具坐標(biāo)系 Z 軸的平行, 連接盤 1、2的中心定位及 3 個(gè)定位銷的輔助定位, 確保了傳感器 X/Y 軸與機(jī)器人工具坐標(biāo)系 X/Y 軸的平行.
試驗(yàn)中六維力傳感器負(fù)載采用如圖 4 所示的配重塊, 共采用 7 個(gè)配重塊, 每塊重約 27 kg, 首個(gè)配重塊通過連接法蘭與傳感器連接, 后續(xù)配重塊之間可通過連接孔逐個(gè)累加或拆下, 在試驗(yàn)中實(shí)現(xiàn)負(fù)載重量的調(diào)整. 實(shí)驗(yàn)用系統(tǒng)的實(shí)物照片如圖 5 所示.
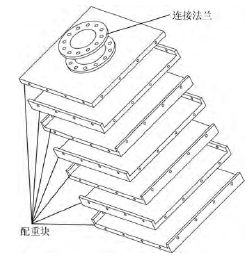
圖 4 試驗(yàn)用配重塊示意圖

圖 5 系統(tǒng)實(shí)物照片
2.2 實(shí)驗(yàn)過程及結(jié)果
為充分驗(yàn)證所研究的算法, 分別對(duì) 7 種負(fù)載重量 (安裝 1 ∼ 7 個(gè)配重塊) 下的重力補(bǔ)償精度進(jìn)行實(shí)驗(yàn)驗(yàn)證.對(duì)每種負(fù)載, 調(diào)整機(jī)器人到表 3 所列的 8個(gè)姿態(tài)采集傳感器數(shù)據(jù). 試驗(yàn)中傳感器采樣頻率為7 000 Hz, 連續(xù)采集 500 個(gè)求平均作為計(jì)算參考數(shù)據(jù). 給出安裝 7 個(gè)配重塊時(shí)采集的傳感器數(shù)據(jù)見表4.計(jì)算得到 7 種負(fù)載情況下的負(fù)載重力、機(jī)器人安裝傾角參數(shù)如表 5, 7 種負(fù)載情況下得到的傳感器零點(diǎn)如表 6, 而后調(diào)整機(jī)器人至 (A: 0?, B: 90?, C:0?) 的姿態(tài), 進(jìn)行外力感知計(jì)算, 在負(fù)載不受外力的條件下, 記錄消除傳感器零點(diǎn)及負(fù)載重力影響后的數(shù)據(jù)作為補(bǔ)償誤差, 誤差統(tǒng)計(jì)結(jié)果見表 7, 其中, Fe為重力補(bǔ)償后傳感器 3 個(gè)力分量的合力大小, Me為重力補(bǔ)償后傳感器 3 個(gè)力矩分量的合力矩大小, G為測(cè)得的負(fù)載重力大小, Mg為機(jī)器人姿態(tài) (A: 0?,B: 90?, C: 0?) 時(shí)負(fù)載對(duì)傳感器的力矩大小, 此時(shí)傳感器 Z 軸近似與水平面平行, 負(fù)載對(duì)傳感器的力矩可由 Mg= G × z 估算得到. δF表示 Fe相對(duì)于G 的百分比, δM表示 Me相對(duì)于 Mg的百分比.由表 7 可見, 消除傳感器零點(diǎn)及負(fù)載重力作用后, 感知外力誤差在負(fù)載重力的 0.28 % 以內(nèi), 感知外力矩的誤差在負(fù)載對(duì)傳感器力矩的 0.59 % 以內(nèi)
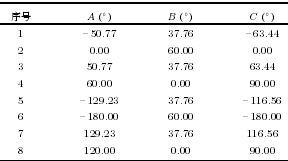
表 3 機(jī)器人姿態(tài)列表
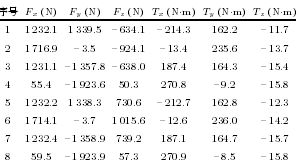
表 4 加載 7 個(gè)配重塊時(shí)的傳感器數(shù)據(jù)
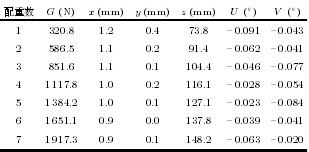
表 5 負(fù)載重力及機(jī)器人安裝傾角計(jì)算結(jié)果
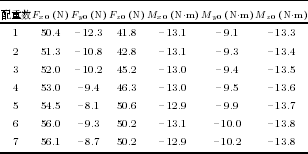
表 6 六維力傳感器零點(diǎn)計(jì)算結(jié)果
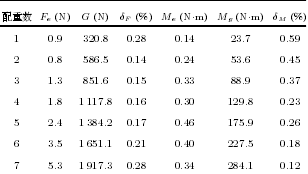
表 7 受力感知誤差統(tǒng)計(jì)
為驗(yàn)證采用所述方法測(cè)量負(fù)載重力的精度, 通過其他測(cè)量方式實(shí)測(cè)所安裝負(fù)載的重量進(jìn)行對(duì)比.表 5 中得到的負(fù)載重力包含了安裝至六維力傳感器上所有零部件的重量, 同時(shí)也包含了六維力傳感器敏感端自身的重量. 而傳感器敏感端無法拆下單獨(dú)稱重, 因此, 在六維力傳感器空載情況下 (即不安裝任何零部件至傳感器), 進(jìn)行與上述完全相同的實(shí)驗(yàn)過程, 計(jì)算得到傳感器敏感端自重為 35.5 N.表 5 中 負(fù) 載 重 力 G 減 去 傳 感 器 敏 感 端 重量, 即可得到安裝至傳感器上零部件的重量, 如表 8 “安裝重量計(jì)算值” 所示. 另一方面, 實(shí)測(cè)安裝至傳感器上零部件的重量. 使用 S 型拉力傳感器, 采用懸掛方式測(cè)量, 選用中諾傳感器公司 ZNLBS-200 型傳感器, 量程 200 kg, 測(cè)量精度0.05 %, 即 200 × 0.05 % = 0.1 kg, 傳感器示數(shù)乘重力常數(shù) g = 9.8 m/s2, 得到表 8 中 “安裝重量實(shí)測(cè)值”. 表 8 顯示, 負(fù)載重力測(cè)量的最大誤差為 1.2 N,接近于拉力傳感器的測(cè)量誤差.
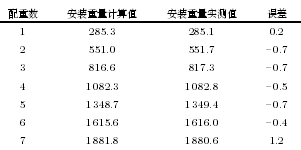
表 8 負(fù)載重力測(cè)量誤差統(tǒng)計(jì) (N)
3、 感知誤差分析
3.1 傳感器測(cè)量精度的影響
表 2 給出了所用六維力傳感器的測(cè)量精度, 數(shù)據(jù)來自原廠給出的精度測(cè)試報(bào)告, 列出的精度指標(biāo)為測(cè)試中出現(xiàn)的全量程最大精度偏差. 其中, 力最大偏差為 18 000 × 0.09 % = 16.2 N, 力矩最大偏差為 1 400 × 0.87 % = 12.18 N·m. 實(shí)驗(yàn)中對(duì)連續(xù)采集的 500 組傳感器求平均作為參考數(shù)據(jù), 因此, 傳感器誤差的影響達(dá)不到上述最大偏差數(shù)值. 對(duì)采集的傳感器數(shù)據(jù)求平均一定程度減小了數(shù)據(jù)的隨機(jī)波動(dòng),但不能完全消除, 波動(dòng)的程度會(huì)造成最終的感知誤差. 為評(píng)估求平均后數(shù)據(jù)的波動(dòng)程度, 在靜止?fàn)顟B(tài)下, 連續(xù)采集傳感器數(shù)據(jù)序列 65 000 組, 每 500 組求平均后得到 130 組數(shù)據(jù). 對(duì)于求平均得到的數(shù)據(jù)序列, 對(duì) 6 個(gè)測(cè)量分量, 求出每個(gè)分量數(shù)據(jù)序列中最大值與最小值的差 D 及標(biāo)準(zhǔn)差 σ, 以評(píng)價(jià)數(shù)據(jù)的波動(dòng)程度, 見表 9.
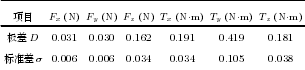
表 9 參考數(shù)據(jù)隨機(jī)誤差
對(duì)于力的感知誤差, 表 9 中的波動(dòng)值遠(yuǎn)小于表 7中的誤差值 Fe. 對(duì)于力矩, 表 9 中的波動(dòng)值則與表7 中的誤差值 Me相當(dāng). 因此, 對(duì)于表 7 中的感知誤差, 力矩感知誤差可以通過數(shù)據(jù)隨機(jī)誤差解釋, 而力感知誤差則存在其他原因.
3.2 機(jī)器人姿態(tài)角度誤差的影響
本文在計(jì)算中直接使用了機(jī)器人控制系統(tǒng)提供的 A、B、C 值, 即機(jī)器人工具坐標(biāo)系相對(duì)于基座標(biāo)系的角度值. 控制系統(tǒng)給出的角度值與真實(shí)值間的誤差將對(duì)最終的受力感知帶來誤差.按照所述算法, 仿真計(jì)算所述角度誤差對(duì)最終受力感知的影響, 仿真所采用的機(jī)器人姿態(tài)讀數(shù)與表 3 實(shí)驗(yàn)數(shù)據(jù)完全相同, 所用負(fù)載質(zhì)量特性及機(jī)器人底座傾角數(shù)據(jù)采用表 5 中第 7 行的數(shù)據(jù). A、B、C值的誤差為人為指定, 得出不同 A、B、C 誤差引起的機(jī)器人在姿態(tài) (A: 0?, B: 90?, C: 0?) 下的受力感知誤差如圖 6 所示.

圖 6 機(jī)器人姿態(tài)誤差對(duì)受力感知的影響曲線
圖 6 中的 3 條曲線對(duì)應(yīng) A、B、C 值各自誤差對(duì)受力感知的影響. 由圖 6 可見, 受力感知誤差與角度誤差近似呈正比例線性關(guān)系, 機(jī)器人在姿態(tài) (A: 0?,B: 90?, C: 0?) 時(shí), B 值誤差的影響遠(yuǎn)大于 A、C,因此, 下面分析 B 值誤差引起受力感知誤差的具體大小.對(duì)于工業(yè)機(jī)器人的絕對(duì)定位誤差, 機(jī)器人制造商往往不給出相關(guān)數(shù)值, 而需要使用者自行測(cè)量標(biāo)定[20−21]. 文獻(xiàn) [22] 對(duì) KUKA公司 KR500 機(jī)器人(額定負(fù)載 500 kg) 進(jìn)行了誤差測(cè)量, 機(jī)器人工具坐標(biāo)系姿態(tài)角度誤差平均值為 0.21?[22], 文獻(xiàn) [23] 對(duì)ABB 公司的 IRB1 600 機(jī)器人進(jìn)行誤差測(cè)量, 最大角度誤差為 0.16?. 參照參考文獻(xiàn)中的測(cè)量結(jié)果, 假定 B 值誤差為 0.1?, 仿真計(jì)算由此造成的實(shí)驗(yàn)中 7種負(fù)載下的受力感知誤差, 結(jié)果如表 10 所示.

表 10 仿真受力感知誤差統(tǒng)計(jì)
對(duì)比表 7 與表 10, 對(duì)于力的感知誤差 Fe, 仿真結(jié)果與實(shí)驗(yàn)吻合較好, 因此, 實(shí)驗(yàn)中力的感知誤差可以由機(jī)器人角度誤差解釋. 而對(duì)于力矩的感知誤差Me, 對(duì)比表 10 與表 9, 表 10 中的誤差值被數(shù)據(jù)隨機(jī)誤差“淹沒”.上述的實(shí)驗(yàn)與仿真計(jì)算可以表明, 表 7 中力的感知誤差主要由機(jī)器人姿態(tài)角度誤差引起, 力矩感知誤差主要由采樣數(shù)據(jù)的隨機(jī)誤差引起.
4、 結(jié)論
本文面向工業(yè)機(jī)器人在加工、裝配等應(yīng)用中精確測(cè)量外力的需求, 在機(jī)器人末端與負(fù)載之間設(shè)置六維力傳感器, 并研究一套標(biāo)定與計(jì)算方法, 在通過機(jī)械定位保證六維力傳感器與機(jī)器人安裝精度的條件下, 方法綜合考慮了負(fù)載重力作用、傳感器零點(diǎn)、機(jī)器人安裝傾角等因素, 利用不少于 3 個(gè)機(jī)器人姿態(tài)下的力傳感器數(shù)據(jù), 采用最小二乘法求得傳感器零點(diǎn)、機(jī)器人安裝傾角、負(fù)載重力大小、負(fù)載重心坐標(biāo)等參數(shù), 進(jìn)一步消除傳感器零點(diǎn)及負(fù)載重力對(duì)受力感知的影響, 精確得到機(jī)器人末端負(fù)載所受的外部作用力與力矩.實(shí)驗(yàn)中對(duì)于重量從 320 N 到 1 917 N 的負(fù)載,重力補(bǔ)償后傳感器感知外力的誤差在負(fù)載重力的0.28 % 以內(nèi), 感知外力矩的誤差在負(fù)載對(duì)傳感器力矩的 0.59 % 以內(nèi). 實(shí)驗(yàn)與仿真計(jì)算表明, 力的感知誤差主要由機(jī)器人姿態(tài)角度誤差引起, 力矩感知誤差主要由采樣數(shù)據(jù)的隨機(jī)誤差引起.相對(duì)已有方法, 本文方法的優(yōu)勢(shì)在于:
1) 應(yīng)用過程得到簡(jiǎn)化: 已有方法需要先調(diào)整機(jī)器人到一系列特定姿態(tài)進(jìn)行傳感器數(shù)據(jù)采集, 首先完成零點(diǎn)標(biāo)定計(jì)算, 在消除零點(diǎn)的基礎(chǔ)上, 再調(diào)整機(jī)器人到一系列一般姿態(tài)進(jìn)行傳感器數(shù)據(jù)采集, 計(jì)算得到負(fù)載重力影響參數(shù), 前后需要 2 次機(jī)器人姿態(tài)調(diào)整及數(shù)據(jù)采集計(jì)算過程, 而本文方法只需 1 次機(jī)器人姿態(tài)調(diào)整過程, 得到不少于 3 個(gè)機(jī)器人姿態(tài)下的傳感器數(shù)據(jù), 即可計(jì)算得出全部所需參數(shù). 另一方面, 采用特殊姿態(tài)進(jìn)行零點(diǎn)標(biāo)定的過程中, 機(jī)器人運(yùn)動(dòng)幅度大,操作時(shí)間較長(zhǎng), 且在空間有限的情況下難以操作, 而本文方法只需機(jī)器人的一系列一般姿態(tài), 機(jī)器人運(yùn)動(dòng)幅度小、效率高, 在空間有限的情況下也可實(shí)施.
2) 有望提高感知精度: 相對(duì)于已有方法利用特定機(jī)器人姿態(tài)下的傳感器數(shù)據(jù), 本文方法中傳感器零點(diǎn)通過一般機(jī)器人姿態(tài)下的傳感器數(shù)據(jù)計(jì)算得到,計(jì)算結(jié)果更具一般性, 有望提高零點(diǎn)精度. 已有方法中傳感器零點(diǎn)通過獨(dú)立的過程求出, 沒有充分考慮零點(diǎn)與其他參數(shù)的耦合影響, 本文方法中所有參數(shù)聯(lián)立建模求解, 各參數(shù)間的耦合作用被充分考慮, 這也有助于提高結(jié)果精度. 另一方面, 本文方法能夠在機(jī)器人最終的目標(biāo)姿態(tài)附近進(jìn)行姿態(tài)變換完成零點(diǎn)標(biāo)定, 求得的零點(diǎn)更接近傳感器在機(jī)器人目標(biāo)姿態(tài)下的零點(diǎn)數(shù)值. 而已有采用特殊姿態(tài)進(jìn)行零點(diǎn)標(biāo)定的方法則很難有針對(duì)性地對(duì)特定姿態(tài)下傳感器的零點(diǎn)進(jìn)行標(biāo)定.
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點(diǎn)
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年6月 新能源汽車銷量情況
- 2025年6月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年6月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年6月 軸承出口情況
- 2025年6月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年6月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況
博文選萃
| 更多
- 機(jī)械加工過程圖示
- 判斷一臺(tái)加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢(shì)
- 國(guó)產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國(guó)的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營(yíng)銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時(shí)代,少談點(diǎn)智造,多談點(diǎn)制造
- 現(xiàn)實(shí)面前,國(guó)人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計(jì)
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別