



基于剛?cè)狁詈狭⑴P式機床模型絲杠振頻分析
2019-5-16 來源:轉(zhuǎn)載 作者:-
摘要:為給具有不同切削特征的高精密立式機床和臥式機床選擇合適的機床,本文以絲杠的振動特性為研究對象,采用有限元和虛擬仿真技術(shù),建立高精密臥式機床和立式機床進給系統(tǒng)剛?cè)狁詈夏P停α⑹郊芭P式機床進給系統(tǒng)絲杠的振動特性進行仿真分析。仿真結(jié)果表明,無論是在z軸方向還是在x 軸方向上,立式和臥式機床絲杠的位移變化都比較小,說明建立的進給系統(tǒng)模型的精密性較高;在本文所添加的材料屬性和切削力的條件下,立式機床工作臺運動特性比臥式機床劇烈,說明臥式機床的精度較高,所以在相同條件下應(yīng)該選擇臥式機床加工零件;無論臥式機床還是立式機床,工作臺在z軸方向的位移變化比在x 軸方向的位移變化劇烈。該研究為z 軸方向的后期優(yōu)化提供了理論基礎(chǔ)。
關(guān)鍵詞:高精密機床;進給系統(tǒng);剛?cè)狁詈夏P停唤z杠;切削力
隨著我國經(jīng)濟的不斷發(fā)展,機床產(chǎn)業(yè)已經(jīng)成為我國的支柱產(chǎn)業(yè),無論是在航空技術(shù)還是在現(xiàn)代電子工業(yè)的發(fā)展水平上,對所需的材料和型面要求都比較高,以必須采用高精密數(shù)控機床進行加工和制造。
在零件加工過程中,機床零部件會發(fā)生變形,所以考慮零件的柔性化使機床的加工和生產(chǎn)制造更加精確。對機床進給系統(tǒng)的零部件進行多柔化是提高仿真精度的一個重要方向。近年來
,ADAMS軟件在機床領(lǐng)域是應(yīng)用最廣泛的動力學仿真軟件,其分析的主要對象為剛體模型
,但還未實現(xiàn)直接對滿足變形振動的柔性體模型,需要通過其他軟件實現(xiàn)柔性體建模。HyperMesh軟件是廣泛應(yīng)用于各個領(lǐng)域的通用有限元分析軟件,具有良好的前后處理界面及高效精確的求解器。
目前,高精密數(shù)控機床進給系統(tǒng)的研究已成為國際眾多學者研究的熱點問題,但對于橫向
、軸向和扭轉(zhuǎn)3個方向的運動研究比較少。
李忠新等人研究了絲杠不同進給速度對工作臺的影響,但是沒有對位移和加速度進行研究
。因此,本文以高精密數(shù)控機床進給系統(tǒng)為研究對象,采用 HyperMesh
和 ADAMS軟件,建立剛?cè)狁詈夏P停謩e研究高精密立式和臥式機床進給系統(tǒng)絲杠的振動特性,并在一定范圍內(nèi)比較其精確度,以選擇合適的機床。
該研究為柔性體振動的仿真運動提供了更加真實可靠的依據(jù),尤其對高精密機床的仿真模擬具有重要意義。
1 、進給系統(tǒng)三維模型的建立
利 用三維建模軟件SolidWorks建立高精密機床進給系統(tǒng)模型,進給系統(tǒng)結(jié)構(gòu)模型如圖1所示。
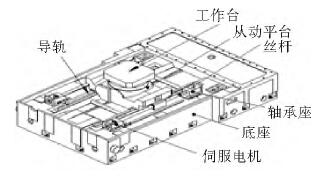
圖1 進給系統(tǒng)結(jié)構(gòu)模型
建模所圖1 進給系統(tǒng)結(jié)構(gòu)模型需要的基本參數(shù)為:絲杠直徑66mm,絲杠導(dǎo)程10mm,兩絲杠間的跨距為680mm,床身尺寸為2 860mm×875mm×225mm,伺
服電機型號為 Y355L3-4。
2 、進給系統(tǒng)剛?cè)狁詈夏P偷慕?/strong>
2.1 進給系統(tǒng)零部件有限元建模
將所得模型中的絲桿和工作臺的三維模型導(dǎo)入 HyperMesh中,定義絲杠和工作臺材料屬性:材料密度為7800kg/m3,彈性模量為210GPa,泊松比為0.3。添加相應(yīng)的約束,并對其進行網(wǎng)格劃分,網(wǎng)格劃分是有限元非常重要的環(huán)節(jié),網(wǎng)格質(zhì)量對分析結(jié)果的精度會造成很大的影響。
劃分網(wǎng)格時要注意網(wǎng)格的密度,不能太稠密,否則會導(dǎo)致計算量不斷增加;同時,網(wǎng)格密度也不能太稀疏,否則無法得到準確的求解精度。本文選擇能很好適應(yīng)邊界條件的、尺寸為20的四面體網(wǎng)格,得到各零部件的柔性體模型。絲杠和工作臺有限元模型如圖2所示。
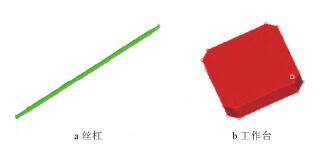
圖2 絲杠和工作臺有限元模型
2.2 模態(tài)中性文件的生成
ADAMS中存在兩種方 法建立柔性體。第 1 種 是ADAMS軟件里有自動柔性化功能,利用這一功能將剛性體轉(zhuǎn)換為柔性體;第2種是在一些有限元軟件中生成模態(tài)中性文件
,并導(dǎo)入 ADAMS中,這里選擇第 2 種方法,在 HyperMesh中生成絲杠和工作臺的模態(tài)中 性文件 mnf文件。
2.3 進給系統(tǒng)剛?cè)狁詈夏P偷慕?/font>
1)將進給系統(tǒng)的三維建模零件圖導(dǎo)入 ADAMS中,在軟件中添加相應(yīng)約束及驅(qū)動,
以形成一個完整的仿真系統(tǒng),進給系統(tǒng)各零部件約束關(guān)系如圖3所示。
圖3 進給系統(tǒng)各零件約束關(guān)系
為驗證各運動副添加的合理性,對其進行仿真。若能合理運動,則說明運動副的添加合理
;若不能運動,則對運動副進行修改,找出其中錯誤的地方,然后在“Sim-ulation”選項中選擇“設(shè)置”,輸入 end time:5.0,Steps:100仿真,驗證約束的合理性。
2)用以上生成的模態(tài)中性文件對剛性體進行替換,對不符 合 要 求 的 零 部 件 進 行 調(diào) 整,然 后 在 “Simula-tion”選項中選擇“設(shè)置”,輸入 end time5.0,Step100 進行仿真分析驗證,得到剛?cè)狁詈线M給系統(tǒng)模型。
3)在模擬仿真時,需考慮實際環(huán)境中的阻力對進給系統(tǒng)的影響。一是在模型中添加絲杠預(yù)緊力,結(jié)合本文絲杠的型號:W5012Z-576PSST-C3Z20,經(jīng)查表計算得預(yù)緊力為225N;二是對模型中摩擦力的處理,摩擦力是影響加工中心的一個重要因素,低速進給時易使橫梁產(chǎn)生跟隨誤差,為了分析加工狀態(tài),在模型中需添加一個與預(yù)緊力大小一致的摩擦力,即225N;三是對切削力的處理,在高速進給時,切削力的不斷變化對加工穩(wěn)定性有重要
影響。
其切削力為:

3、立式及臥式機床絲杠的運動特性仿真分析
3.1 切削力的添加按照以上步驟,把絲杠和工作臺的模態(tài)中性文件導(dǎo)入 ADAMS
中代替剛性體文件,生成高精密機床進給系統(tǒng)的剛?cè)狁詈夏P汀T跈C床進給系統(tǒng)模型中,主要考慮工作臺上的零件在切削力作用下所導(dǎo)致的進給系統(tǒng)的振動,立式機床和臥式機床進給系統(tǒng)主要是因為切削力的方向不同,所以在臥式工作臺上添加y方向上的切削力,力的大小為222.63N,相位為0°,方向沿y 方向;在立式工作臺上添加z方向的切削力,力的大小為536.39N,相位為0°,方向沿z方向[10]。
3.2 仿真分析
首先對臥式機床進行仿真分析,單擊(仿真)Simulation命令,輸入end time5.0,Step100進行運動仿真,然后依次單擊(結(jié)果、后處理)Rusults
和 Postprocessor,進入后處理模塊,在“Filter”中選擇 body,在
“Characteristic”中選擇“Position”,在“Component”中選擇z,得到臥式機床絲杠在柔性體絲杠上沿z方向的位置變;同理,對立式機床做同樣的操作,得到臥式機床和立式機床絲杠在z方向的位置變化。臥式和立式機床絲桿沿z 方向位置
變化如圖4所示。
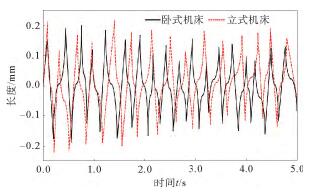
圖4 臥式和立式機床絲杠沿z方向位置變化
由圖4可已看出,在z方向,臥式機床和立式機床工作臺位移變化趨勢大致相同,臥式機床絲杠的位移變化最大值為0.2mm,立式機床絲杠的位移變化最大值為0.23mm,在機床的工作過程中,立式機床工作臺的位移變化要比臥式機床工作臺的位移變化劇烈。對臥式機床進行分析,在“Filter”中選擇 body,在“Characteristic”中選擇“Position”,在“Component”中選擇x,得到臥式機床進給系統(tǒng)絲杠在柔性絲杠的位置變化;同理,對立式機床進給系統(tǒng)進行同樣操作,得到臥式和立式機床絲杠在x 方向的位置變化。臥式和立式機床絲杠沿x 方向位置變化如圖5所示。
圖5 臥式和立式機床絲杠沿x方向位置變化
由圖5可以看出,在x 方向上,臥式機床和立式機床工作臺位移變化趨勢差異性比較強,臥式機床絲杠的位移變化最大值為0.09mm,立式機床工作臺的位移變化最大值為0.112 5mm,在機床工作過程中,立式機床絲杠的位移變化要比臥式機床絲杠的位移變化劇烈。
對臥式機床進行分析,在 “Filter”中 選 擇 body,在“Characteristic”中 選 擇 “Acceleration”,在 “Component”中選擇z,得到臥式機床進給系統(tǒng)絲杠在柔性絲杠的加速度變化;同理,對立式機床進給系統(tǒng)進行同樣的操作,得到臥式和立式機床絲杠沿z方向的加速度變化如圖6所示。由圖6可以看出,在z 軸方向上,臥式和立式機床工作臺位移變化趨勢相似,臥式機床絲杠加速度變化最大值為7000mm/s2,立式機床工作臺加速度變化最大 值 5 000mm/s2,在機床工作過程中,立式機床絲杠的位移變化比臥式機床絲杠的加速度變化劇烈。
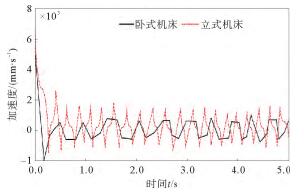
圖6 臥式和立式機床絲杠沿z方向加速度變化
4 、結(jié)束語
本文主要對高精密立式和臥式機床進給系統(tǒng)絲杠的振動特性進行研究。研究結(jié)果表明,無論是在z 方向還是在x 方向上,立式和臥式機床絲杠的位移變化較小,說明本文所建立的進給系統(tǒng)模型的精密性較高;針對高精密機床進給系統(tǒng)中絲杠的運動特性,采用 ADAMS和 HyperMesh軟件,建立了臥式和立式機床進給系統(tǒng)剛?cè)狁詈夏P停辉诒疚乃砑拥牟牧蠈傩院颓邢髁Φ臈l件下,立式機床工作臺運動特性要比臥式機床劇烈,所以臥式機床的精度要高,在相同條件下應(yīng)該選擇臥式機床加工零件;無論是臥式機床還是立式機床,工作臺在z 軸方向的位移變化比在x 方向的位移變化劇烈,為z方向的后期優(yōu)化提供了理論基礎(chǔ)。該研究為柔性體振動的仿真運動提供了更加真實可靠的依據(jù)。
來源:青島大學 機電工程學院 動力集成及儲能系統(tǒng)工程技術(shù)中心
作者: 宣賀,華青松,張洪信,程聯(lián)軍,趙清海,張震,張昊
投稿箱:
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年6月 新能源汽車銷量情況
- 2025年6月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年6月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年6月 軸承出口情況
- 2025年6月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年6月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況