


基于 VERICUT 的 CKA6150 數控車床 仿真研究
2017-12-12 來源:天津機電職業技術學院產學研中心 作者:趙華,李衛兵
摘要:針對在企業生產和教育培訓領域廣泛使用的 CKA6150 數控車床,在 VERICUT 中構建仿真模型,對仿真機床構建的一般方法和步驟進行探討,給出了構建過程中的注意事項和一些實用技巧。以數控車床防護門及四工位回轉刀架的控制為例,重點研究了通過宏命令子程序及特殊控制指令定制來控制機床部件運動的方法。通過一個仿真實例的運行,驗證了所構建仿真機床的正確性,為宏程序及其它復雜車削工件加工程序校驗及教學培訓提供可靠的 CKA6150 仿真。
關鍵詞:;CKA6150 數控車床;宏命令;仿真
VERICUT 是一款專業的數控加工仿真軟件,可以對各種數控加工設備的加工過程進行仿真,廣泛應用于生產和培訓領域[1]。VERICUT為用戶提供了豐富的機床及系統樣本庫,但尚不完善,數控車床案例缺乏,樣本機床形式單一,難以實現復雜運動的控制[2]。因此,本文針對數控臥式車床 CKA6150 進行仿真研究,對構建仿真加工環境的一般方法和步驟進行探討,對通過宏命令子程序及自定義高級指令來進行機床附件控制的方法進行重點研究。
1 、機床構建
CKA6150 數控車床是大連機床廠生產的一款縱(Z)、橫(X)兩坐標控制的數控臥式車床,配有華中世紀星的數控系統 HNC-21T。CKA6150 數控車床采用的是平床身結構,配有氣動卡盤和四工位回轉刀架,結構及主要組成部件如圖 1 所示。

圖 1 CKA6150 數控車床結構及主要部件
分析 CKA6150 數控車床各部件之間的運動關系,組合關系和相對位置關系,根據說明書中的幾何參數,在 Solid Works 軟件中建立簡化的機床 3D 模型如圖 2 所示。在建立裝配體時一定要注意繪圖區左下角的坐標系要和數控車床坐標系一致(笛卡爾直角坐標系),以便輸出的 STL 模型在導入 VERICUT 后能夠配置出正確的運動方向。
在 Solid Works 軟件中把整個 3D 模型裝配體另存為 STL 格式導入 VERICUT,進行機床各部件的功能配置。VERICUT 軟件提供了不同類型的 Component(組件),如 Base(床身)、Spindle(主軸)、X Linear(X 軸)、Z Linear(Z 軸)、Turret(刀架)、Stock(毛坯)等。通過建立不同類型的 Component(組件)并添加 3D 模型到某一類型的 Component(組件),對導入 VERICUT 的每一個 3D 模型進行功能配置。各個 Component(組件)之間可以設置從屬或者并列的關系,根據數控車床各部件之間的實際運動層次關系建立 Project Tree(項目樹),即機床部件運動拓撲關系。CKA6150 數控車床 Project Tree(項目樹)及各部件名稱及Component(組件)類型如圖 3 所示。
圖 2 CKA6150 數控車床 3D 模型
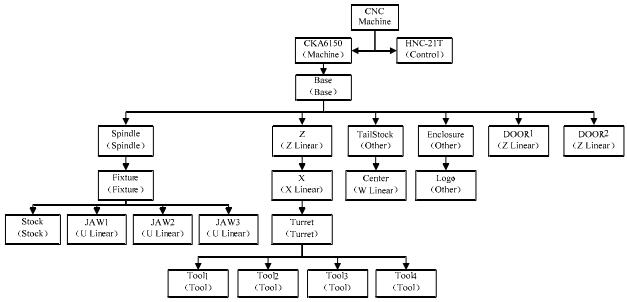
圖 3 CKA6150 數控車床 Project Tree 簡圖
VERICUT 機床構建過程中,一個重要的環節是坐標系的建立及各部件坐標位置的調整。VERICUT 中可以建立多個坐標系,并設置其中之一作為當前坐標,同時 VERICUT 還具有多個性質的坐標系,如 ZModel、ZComponent、ZMachine 等。每一個 Component(組件)都有一個組件坐標系 ZComponent,它決定著該Component(組件)的運動方向。組件坐標系隨著 Component(組件)位置的改變而改變。
Component(組件)的位置及其 Component(組件)下屬的 3D 模型位置決定著屏幕上 3D 模型的實際位置,正確理解這一點,對正確構建仿真模型極其重要。對于四工位回轉刀架 Turret可以借助 Configure Component>Turret Aid 進行設置。但是由于 VERICUT 默認的回轉刀架回轉軸與 Z 軸平行,這時就需要沿 Turret 的組件坐標系的 X 軸旋轉 90°,可以通過 Configure Component>Rotate>Angles,設置旋轉角度為(90 0 0),同時把 Turret 下屬的所有 3D 模型沿相反方向旋轉 90°,即設置旋轉角度為(-90 0 0),才能得到正確的回轉刀架運動。對于三爪卡盤,只設置 U Linear(U 軸)一種 Component(組件),然后通過對相應組件坐標系的設置來調整卡爪的實際運動方向,這樣可以簡化控制系統的定義。具體操作方法為,復制 JAW1兩次,分別重命名為 JAW2 和 JAW3,通過Configure Component > Rotate > Angles 設 置JAW2 的旋轉角度為(0 0 120),JAW3 的旋轉角度為(0 0 -120)。
2 、系統配置
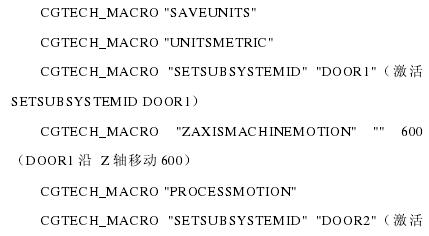
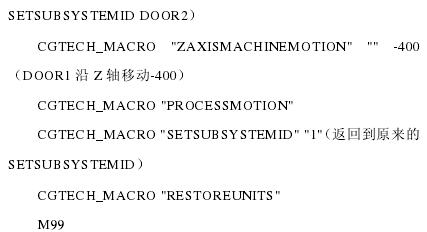
CKA6150 數控車床配置了華中世紀星的數控系統 HNC-21T。由于該系統與 FUNAC 系統非常相似,因此可以直接調用 FUNAC 0T 作為模板進行配置,下面以機床防護門及三爪卡盤的控制為例,探討系統高級控制功能的配置。 由于機床防護門 DOOR1 和 DOOR2 都采用了 Z Linear(Z 軸)作為 Component(組件)類型,為了加以區分,通過 Configure Component>Component>Sub System 進行 Sub System 的ID 設置,分別設置為 DOOR1 和 DOOR2。本文采用在 NC Subroutines 添加子程序,在數控程序調用子程序的方式實現控制,例如關門子程序及注釋如下所示。
對于三爪卡盤,由于已經通過對相應組件坐標系的設置,使每一個卡爪的運動方向 U 和整個機床的 X 方向平行,因此可以通過統一的指令設置來實現三個卡爪的同時向心運動。任何數控編碼(指令、變量及字符)都必須首先進行字格式的預定義,才能被虛擬數控系統識別和解釋[3]。通過 Configuration>Word Format>Add 對卡盤控制所需的字格式進行定義,如圖 4所示。
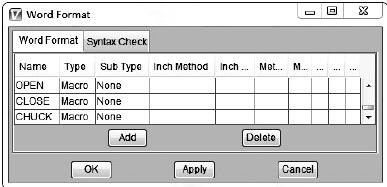
圖 4 字格式的定義
字格式定義之后,通過 Configuration>G-Code Processing>Add 對這些字的功能進行配置。由于三爪卡盤的初始狀態是張開的極限位置,因此卡爪松開控制時,卡爪相對初始位置無需移動,通過字 OPEN 調用 VERICUT 的宏命令 UAxis Machine Motion(U 軸移動)使卡爪沿各自組件坐標系的 X 軸移動距離為 0;卡爪夾緊控制時,通過字 CLOSE 調用宏命令UAxis Machine Motion 使卡爪沿各自組件坐標系的 X軸移動,調用宏命令 Component Name(接觸到的零件名稱)及 Touch(保持運動直到接觸到某工件)使爪接觸到 Stock(工件)后停止運動。具體定義如圖 5 所示,指令 OPEN CHUCK 使卡爪松開,指令 CLOSE CHUCK 使卡爪夾緊工件。

圖 5 卡爪控制指令配置
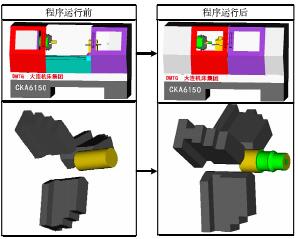
圖 6 仿真實例驗證結果
3 、結語
基于 VERICUT 虛擬加工仿真軟件,本文構建了 CKA6150 數控車床,介紹了仿真機床構建的一般方法和步驟,探討了構建過程中一些實用技巧,重點研究了子程序及特殊控制指令的定制方法,給出了數控車床防護門和四工位回轉刀架的控制指令的配置方法。在該仿真機床上對一個外輪廓車削的教學實例進行仿真加工,程序運行前后如圖 6 所示,驗證了本文所構建的仿真機床的正確性。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

