控")



西門子828D數(shù)控系統(tǒng)在展刀上的應(yīng)用研究
2024-1-23 來源: 萬向錢潮股份公司 作者:張銀橋 姚禮軍
摘要:基于西門子828D數(shù)控系統(tǒng),設(shè)計了一套帶有展刀頭的車加工機(jī)床控制系統(tǒng),主要由西門子828D數(shù)控系統(tǒng)、基恩士高精度接觸式傳感器、輸入/輸出模塊、S120伺服驅(qū)動器、伺服電機(jī)和絕對位置編碼器組成。利用數(shù)控系統(tǒng)的軸耦合功能,使展刀徑向位移與軸向進(jìn)給能夠在金屬切削加工時做到插補(bǔ)運算,滿足外圓、圓弧、倒角等加工要求。與普通數(shù)控車床相比,應(yīng)用展刀技術(shù)的車床具有加工效率和精度高,剛性好,機(jī)床結(jié)構(gòu)緊湊,操作方便等特點。
關(guān)鍵詞:展刀頭;展刀動力頭結(jié)構(gòu);虛擬軸;軸耦合;伺服控制
0 引言
展刀頭是一種在隨主軸旋轉(zhuǎn)時還驅(qū)動刀具進(jìn)行徑向位移的裝置,常用于非標(biāo)準(zhǔn)專用切削類機(jī)床。其動作與原理如下:通過驅(qū)動位移拉桿向后位移來帶動滑塊移動,主要是位移拉桿驅(qū)動斜柄使滑塊做徑向位移,從而帶動安裝在滑塊上的刀架在旋轉(zhuǎn)的同時做徑向運動進(jìn)行切削。雙刀展刀頭(圖1)應(yīng)用廣泛,適用于圓孔內(nèi)外加工、車銑、車牙、搪溝槽、錐形、凹面或凸面等圓球面加工。
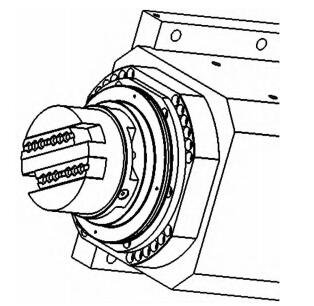
圖1 展刀頭示意圖
1、驅(qū)動方式分類及展刀動力頭結(jié)構(gòu)
針對展刀盤滑塊徑向運動,目前有兩種驅(qū)動方式,一種是靠液壓傳動來控制展刀徑向行程,另一種是通過伺服來控制展刀徑向行程。其中,液壓控制展刀響應(yīng)速度慢、精度低,應(yīng)用場合有限;而伺服控制展刀響應(yīng)速度快、精度高,可以利用現(xiàn)有數(shù)控技術(shù)的插補(bǔ)功能,
實現(xiàn)圓弧面加工。
文獻(xiàn)[1]的專利提供了一種展刀動力頭結(jié)構(gòu)(圖2),其由雙伺服驅(qū)動分別驅(qū)動展刀頭旋轉(zhuǎn)和展刀滑塊相對移動,主要包括主軸、絲桿、滑塊、展刀盤和主軸箱體,主軸通過兩只主軸軸承支承在主軸箱體上,外部的伺服電機(jī)通過驅(qū)動帶輪驅(qū)動主軸旋轉(zhuǎn),帶動展刀盤上的刀具做旋轉(zhuǎn)運動。具體傳動方式如下:展刀盤22中心的滑塊7沿主軸軸向做前后運動時,滑塊7兩側(cè)的斜齒結(jié)構(gòu)驅(qū)動徑向的刀體滑軌21做徑向運動,從而驅(qū)動安裝在其上面的刀具進(jìn)行徑向調(diào)節(jié),主軸3前端安裝絲桿6用于驅(qū)動滑塊7,絲桿6由螺母座套筒8后端的展刀帶輪5驅(qū)動,通過控制展刀帶輪5與主軸3之間的差速,實現(xiàn)對絲桿6精確的位置控制。
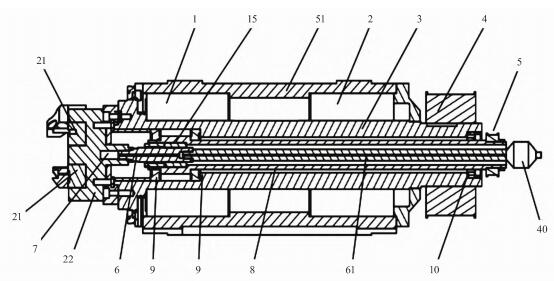
1—主軸軸承A;2—主軸軸承B;3—主軸;4—主軸帶輪;5—展刀帶輪;6—絲桿;7—滑塊;8—螺母座套筒;9—軸承;10—支撐軸承;
15—螺母;21—滑軌;22—展刀盤;40—配油器;51—主軸箱體;61—配油管。
圖2 展刀動力頭結(jié)構(gòu)
2、伺服驅(qū)動的具體實現(xiàn)方法
2.1 系統(tǒng)配置
設(shè)備控制采用西門子828D數(shù)控系統(tǒng),配備3個驅(qū)動器和3個伺服電機(jī)。其中一個伺服控制主軸帶動展刀盤旋轉(zhuǎn);一個伺服控制刀體滑塊移動,需要配合主軸做同步運動才能控制展刀位置穩(wěn)定不變,當(dāng)需要改變展刀徑向位置時,要求當(dāng)前伺服電機(jī)在耦合主軸同步轉(zhuǎn)速的基礎(chǔ)上進(jìn)行位置控制,耦合技術(shù)詳見文獻(xiàn)[2];剩下的一個伺服控制整個展刀動力頭做軸向往復(fù)運動。在選擇828D數(shù)控系統(tǒng)車床版本時,要注意選擇能夠兼容四軸及以上的版本,因為控制設(shè)備運行時用到虛擬軸技術(shù),占用一個軸的位置,它是由主軸和控制展刀的伺服軸耦合出來的,在系統(tǒng)上表示展刀徑向位移,并且在數(shù)控系統(tǒng)里要對虛擬軸進(jìn)行NC參數(shù)設(shè)定。數(shù)控系統(tǒng)需配置“電子齒輪”功能選項,使用輔助功能“電子齒輪”可以控制跟隨軸運動,使之按照線性運動偏移與最多五個引導(dǎo)軸相關(guān)聯(lián)運動,引導(dǎo)軸和跟隨軸之間的關(guān)聯(lián)按照每個引導(dǎo)軸通過耦合系數(shù)進(jìn)行定義,算出的跟隨軸運動分量是由單個引導(dǎo)軸運動分量乘各自的耦合系數(shù)通過加法構(gòu)成。
2.2 系統(tǒng)輸入/輸出分配及作用
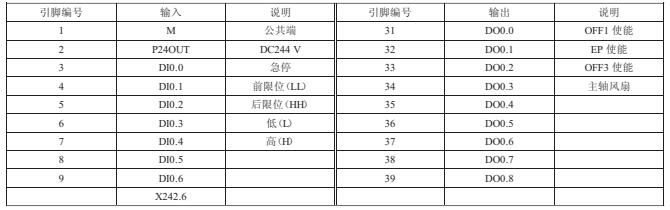
系統(tǒng)的輸入/輸出配置如表1所示,其中DI0.1~DI0.4接的是基恩士GT2-70系列接觸式位移傳感器,該傳感器有5路輸出,分別為良、H、L、HH、LL,表示傳感器將量程分成了5段,測頭位于相應(yīng)的分段內(nèi),傳感器就給出對應(yīng)的信號,把“良”信號接入系統(tǒng)背面X242.6接口,用于快速響應(yīng),其余傳感器輸出接入PLC輸入口。
該傳感器安裝在展刀動力頭末端,用于測量展刀滑塊的移動量,盡管展刀滑塊在展刀盤內(nèi)部,無法直接測量,但是可以通過測量連接展刀滑塊的絲桿的相對位置的移動,通過換算間接測得展刀滑塊徑向移動的距離,測得的絲桿的位置變化與展刀徑向位置變化成線性關(guān)系。設(shè)備在進(jìn)行車削加工前需確定一個基準(zhǔn)點,在基準(zhǔn)點這個位置,測量得出展刀盤上兩把車刀刀尖距離,這個具體同位置傳感器當(dāng)前讀數(shù)對應(yīng),當(dāng)每次找到這個基準(zhǔn)點時,設(shè)備總是能知道當(dāng)前車刀刀尖距離。但設(shè)備實際運行過程中,傳感器測到這個基準(zhǔn)點時會有信號傳遞上的誤差,如果以控制系統(tǒng)收到這個信號為基準(zhǔn)點,時間上的差異將導(dǎo)致基準(zhǔn)的重復(fù)精度不夠,滿足不了設(shè)備加工要求。聯(lián)想到傳統(tǒng)的帶相對位置編碼器的伺服回零方案,也是先找到回零信號,再尋找編碼器零點信號完成回零動作。設(shè)備主軸和同步軸都采用了單圈絕對位置編碼器,當(dāng)找到傳感器的基準(zhǔn)點后,接著讓同步軸往固定方向轉(zhuǎn)動,直到主軸和同步軸角度數(shù)值完全一致,這樣就可以非常精確地對零。
表1 IO輸入/輸出表
2.3 系統(tǒng)的連接和功能調(diào)試
系統(tǒng)的連接根據(jù)西門子提供的828D簡明調(diào)試手冊進(jìn)行,在數(shù)控系統(tǒng)里將所有NC軸配置完成,并根據(jù)828D數(shù)控系統(tǒng)參數(shù)手冊設(shè)置好對應(yīng)軸的NC參數(shù),X軸是伺服進(jìn)給軸,U軸是同步主軸,SP是主軸,V軸是主軸和同步軸耦合出來的虛擬軸,代表徑向位置,V軸的位置0表示尋零位后的參考位置,不代表展刀盤上的兩個刀尖實際距離為0,因此需要在設(shè)備回零后,測量兩把刀尖實際距離,并把對應(yīng)的數(shù)值換算后寫入V軸偏置設(shè)定中,這樣設(shè)備在實際加工作業(yè)時,X軸和V軸是兩個互為插補(bǔ)軸。
同步功能的啟用,根據(jù)828D工作準(zhǔn)備部分編程手冊,首先在“制造商循環(huán)”目錄下導(dǎo)入CYCPE_MA文件,類型為SPF,用記事本打開內(nèi)容為:
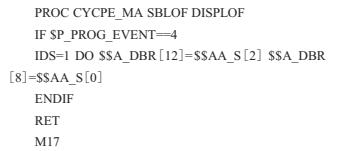
每次系統(tǒng)重啟上電就執(zhí)行同步動作,將主軸和同步主軸的速率實時提取出來,分別賦值給DB4900.DBD8和DB4900.DBD12,PLC通過對這兩個數(shù)據(jù)的處理,可以實時監(jiān)控這兩個軸的轉(zhuǎn)速和同步功能執(zhí)行情況,并做出相應(yīng)的應(yīng)答處理。在系統(tǒng)上電完成,未運行任何程序的情況下,主軸和同步主軸還沒有處于耦合狀態(tài),只是PLC程序?qū)蓚€軸的速度進(jìn)行了監(jiān)控。要想耦合軸數(shù)控系統(tǒng)需要運行一段加工程序,在該程序中,還要完成展刀的尋零動作,保證每一次設(shè)備斷電重啟之后找到的都是同一個零點,也就是找到零點時,雙展刀的刀尖距離都是同一個數(shù)值。以下是運行的加工程序:
1.EGOFS(U1)
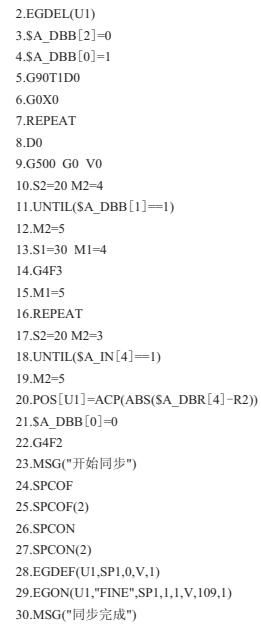
程序運行原理如下:
第一步,取消耦合功能,讓主軸和同步主軸處于能夠自由運動狀態(tài),理由是當(dāng)設(shè)備完成耦合功能時,可能需要再次進(jìn)行回零操作,這時候如果沒有取消耦合功能的話,同步主軸處于耦合狀態(tài),只能跟隨主軸同步運行,無法實現(xiàn)自由轉(zhuǎn)動,也就不能執(zhí)行尋找零位。
第二步,取消展刀滑塊到達(dá)限位就觸發(fā)系統(tǒng)復(fù)位的限制,然后執(zhí)行同步主軸往展刀張開方向轉(zhuǎn)動,當(dāng)展刀滑塊達(dá)到張開最大限位時(即傳感器測頭位于LL區(qū)域)同步主軸停止,主軸往反方向轉(zhuǎn)動3 s停止,使展刀滑塊往回收縮,接著同步主軸往反方向轉(zhuǎn)動,使展刀滑塊進(jìn)一步收攏,一直到零點信號(即傳感器測頭位于“良”區(qū)域)觸發(fā)停止。零點信號直接接入系統(tǒng)背后的快速輸入/輸出點X242.6,提高零點信號的系統(tǒng)響應(yīng)速度。接著,定位同步主軸使同步主軸角度跟隨主軸角度持一致,至此,整個尋零動作完成。
第三步,改變限位功能,$A_DBB[0]=0,通過PLC對這個信號的處理,當(dāng)展刀滑塊運行到設(shè)定的最大距離(即傳感器測頭位于“LL”區(qū)域)和最小距離(即傳感器測頭位于“HH”區(qū)域)時,系統(tǒng)能做出復(fù)位的應(yīng)答反應(yīng)并進(jìn)行報警提示,目的是保護(hù)展刀頭,由于展刀頭上
的滑塊有機(jī)械位置限制,在到達(dá)機(jī)械限位之前先觸發(fā)軟限位,可以起到保護(hù)機(jī)械機(jī)構(gòu)的作用。
第四步,應(yīng)用軸耦合指令開啟軸同步功能,并對耦合關(guān)系進(jìn)行參數(shù)設(shè)定,當(dāng)前程序中,使用了一個跟隨軸U與兩個引導(dǎo)軸(分別是SP1軸和V軸)的耦合關(guān)系,SP軸為實際主軸,耦合類型為0,V軸為虛擬軸,耦合類型為1,并在下一行指令中對電子齒輪比值進(jìn)行了設(shè)定,當(dāng)完成同步功能后,不能對頁面上的同步主軸U進(jìn)行單獨控制,它是跟隨主軸SP1和V軸的位置關(guān)系分量進(jìn)行耦合計算后得到的,在加工程序中,X軸表示進(jìn)給,V軸表示展刀徑向位置,SP是主軸,加工程序的編寫跟普通車床類似,具體如下:
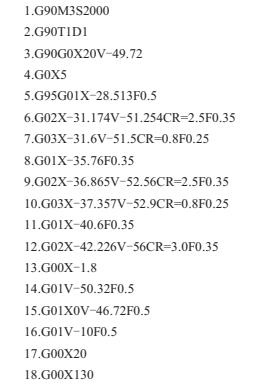
這是一段車外圓并有圓弧臺階銜接的圓柱體的程序,X坐標(biāo)是圓柱體軸向位置,V坐標(biāo)是車刀徑向位置,兩把車刀對稱布置,切削徑向力可以相互抵消,加大一次走刀量,大大提高加工效率。
3、結(jié)語
通過引進(jìn)先進(jìn)的展刀結(jié)構(gòu)理念,本文分析設(shè)計了展刀動力頭傳動機(jī)構(gòu),結(jié)合西門子828D虛擬軸耦合技術(shù),將展刀復(fù)雜的控制運算化簡為一臺普通車床的編程邏輯,并進(jìn)行實物制作和實踐應(yīng)用,取得圓滿成功。應(yīng)用了展刀技術(shù)的車床跟普通數(shù)控車床相比,具有加工效率和精度高,設(shè)備剛性大,加工尺寸穩(wěn)定,編程簡單等特點,相信類似的應(yīng)用在金屬加工行業(yè)中會越來越廣泛。
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年6月 新能源汽車銷量情況
- 2025年6月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年6月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年6月 軸承出口情況
- 2025年6月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年6月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況
博文選萃
| 更多
- 機(jī)械加工過程圖示
- 判斷一臺加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢
- 國產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時代,少談點智造,多談點制造
- 現(xiàn)實面前,國人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別