



感應淬火機床與上下料機械手控制系統的設計
2020-6-17 來源: 湖北汽車工業學院電氣與信息工程學院 作者:雷鈞 羅敏 吳岳敏 劉凌云
摘要: 對汽車轉向節雙工位淬火機床與上下料機械手控制系統進行了設計,雙工位淬火機床采用2 套西門子 808D 數控系統,使用新松 SR120 機械手配合其進行上下料,提高工作效率。淬火機床與上下料機械手信號交互通過西門子 S7-1200PLC,用 PROFINET 總線把它們連接起來。經現場運行,整個系統工作正常,能夠滿足生產需要。
關鍵詞: 機械手; 數控系統; 信號交互
隨著汽車行業的發展,淬火機床在汽車零部件加工中應用越來越廣泛。汽車轉向節承受多變的沖擊負載,要求具有高的強度和硬度,因此多采用高頻淬火工藝。機械手用于單機或自動線上傳送工件,可以減輕操作工的勞動強度,同時還可以大大提升生產效率。從文獻[1-3]可以看出,上下料機械手在機床上應用廣泛,文獻[1]敘述了西門子數控系統通過 IO 與上下料機械手控制系統交互信號,文獻[2-3]敘述了使用PLC 直接控制上下料機械手。
本文以汽車轉向節淬火機床自動上下料為例,使用新松 SR120 機械手,設計淬火機床與上下料機械手控制系統。
1 、工作原理與控制流程
如圖 1 所示,轉向節淬火機床由左右兩個工位組成,實現雙工位交替淬火,提升工作效率。淬火部位是轉向節端面和部分軸頸。每個工位安裝有伺服電動機、主軸旋轉電動機( 三相異步電動機)
、拖板、絲杠、上頂尖、下頂尖等。
上下頂尖頂緊轉向節,主軸旋轉電動機通過皮帶,帶動下頂尖旋轉從而帶動轉向節旋轉,以均勻淬火。頂尖與拖板固定在一起,伺服電動機通過帶動絲杠來實現拖板上下移動。在人工進行上下料時,需要踩住腳踏板讓上頂尖縮回,然后將轉向節上下錐口對齊到上下頂尖,由于轉向節較重,把轉向節和上下頂尖對齊需要較多的時間,影響了生產節拍和效率。
因此在機床外設有一臺新松SR120 關節式機械手帶 2 個手爪,實現轉向節的自動上下料。機械手包括主機與附件、氣動爪具。機械手有效范圍不小于 3. 0 m,A 爪用于上料,B 爪用于下料
。機械手的動作順序是: 首先光電開關檢測抓料架上的抓料位是否有轉向節。如果有料,機械手移動到抓料位,A 爪夾起轉向節; 沒有料則機械手會在原點等待。
機械手夾起轉向節后,返回原點。然后檢測淬火機床兩個工位的安全門是否打開,因為機床加工程序中已經設定加工開始前,門需要關閉,加工完成后,門自動打開,以此來判斷淬火是否完成。等有開門信號時,機械手去相應工位換 B 爪把淬火完的轉向節取下來。機械手退出機床,換 A 爪,把未淬火的轉向節放到淬火工位上,機床上下頂尖固定轉向節。
然后機械手再退出機床到設定點,發上料完成信號,淬火機床數控系統開始啟動轉向節淬火程序。機械手繼續移動到放料位,把淬火后的轉向節放下,然后返回到原點,等待執行下一個循環。
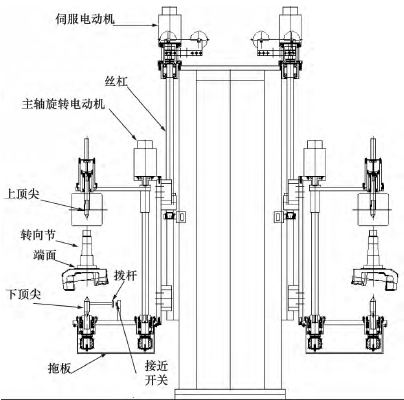
圖1 雙工位轉向節淬火機床
淬火機床收到機械手的上料完成信號后,開始轉向節淬火,如圖 2 所示,先關閉安全門,保證加工安全。隨后主軸電動機通過皮帶帶動下頂尖旋轉。下頂尖側面安裝有撥桿,下頂尖旋轉后撥桿會碰到轉向節的耳朵,帶動轉向節旋轉。如果頂尖沒有頂緊轉向節,會在機床上料位把轉向節甩下來,避免在淬火的時候甩下來,損壞感應圈。為了避免端面定位時感應圈劃傷轉向節端面,過幾秒后旋轉停止。
本淬火系統只有一個電源提供功率,因此同一時刻只有一個工位在進行淬火處理,只能一個接觸器閉合,接觸器只有等待另外一個接觸器斷開才能閉合工作。端面定位啟動后,伺服電動機帶動拖板向上整體移動,當感應圈旁邊的觸頭與轉向節端面接觸,伺服電動機就停止運行并向下后退設定行程便于感應加熱。
端面定位結束后轉向節再次旋轉,接觸器吸合啟動加熱。當淬火達到工藝要求時停止加熱,接觸器斷開,對淬火工件進行冷卻,冷卻時間到后拖板向下移動到下料位,再啟動旋轉定位,方便機械手下料。最后自動打開安全門。
2 、控制系統設計
轉向節雙工位淬火機床由 2 套西門子 808D 數控系統分別控制左右工位,機械手控制系統控制 6 關節機械手的位置,機械手上的氣閥控制氣爪夾緊松開,氣閥由西門子 S7-1200PLC 控制。機械手氣爪張合信號由磁性開關檢測,并且輸出開關信號給 S7 - 1200。808D 數控系統用的是西門子 S7 - 200 的 PLC,不方便與機械手控制系統直接進行信號交互,因此用 S7 -1200 處理數控系統與機械手控制系統的交互信號。
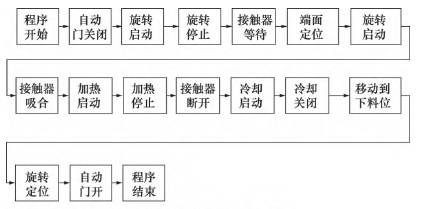
圖2 機床淬火加工流程圖
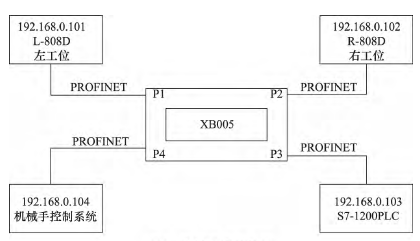
圖3 控制系統結構圖
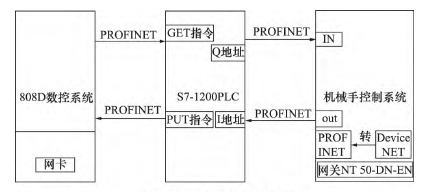
圖4 控制系統信號交互圖
如圖 3 所示,控制系統之間用 PROFINET 總線連接,西門子 XB005 為非網管型交換機。S7-1200 可設置 IP。數控系統自帶網卡,可設置 IP。機械手控制系統用網關NT 50-DN-EN 把 Device Net 轉為PROFINET,可設定 IP 。
3 、控制系統間信號交互設計
控制系統信號交互如圖 4 所示,S7-1200 用 GET指令從左右工位數控系統獲取信號,用 PUT 指令將信號放入相應的數控系統。機械手控制系統與 S7-1200之間的信號交互直接用 S7-1200
的 Q 地址對應機械手控制系統的 IN 地址,S7-1200 的 I 地址對應機械手控制系統的 OUT 地址。機械手控制系統給出的地址可以設定其作用。
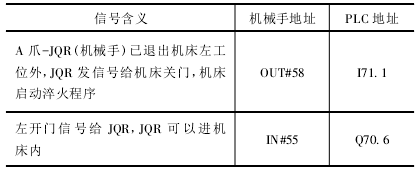
表1 是機械手控制系統與 S7-1200PLC 部分交互信號。
表 1 機械手控制系統與 S7-1200 PLC 部分信號交互表
( 1) 信號從機床數控系統到機械手控制系統以檢測左工位開門為例論述信號流向。如圖 5 所示,開門信號 I5. 3 輸入到 808D 數控系統并控制數控系統的 M50. 3。
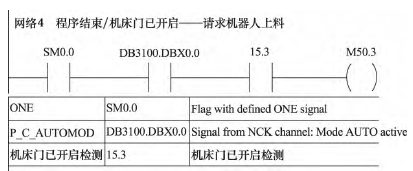
圖5 數控系統開門信號輸出
如圖 6 所示,S7-1200 調用 GET 指令將數控系統M50. 3 的數據讀取到 S7-1200 的 M50. 3。
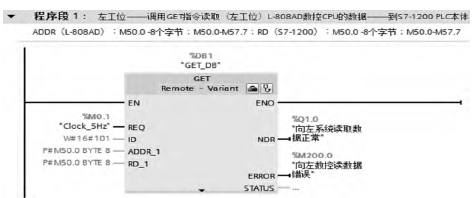
圖6 S7-1200讀取數控系統信號
如圖 7 所示,S7-1200 的 M50. 3 控制 Q70. 6。如表 1 所示,S7-1200 的 Q70. 6 和機械手控制系統的輸入信號 IN#55 是對應的,這樣就把數控系統的機床門檢測信號 I5. 3 傳送到機械手控制系統 IN#55。
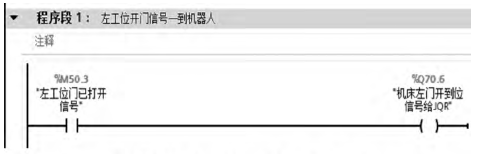
圖7 S7-1200輸出信號到機械手控制系統
( 2) 信號從機械手控制系統傳遞到機床數控系統以機械手退出機床,啟動淬火機床淬火為例論述信號流向。
如表 1 所示,機械手控制系統的 OUT#58對應著 S7 - 1200 的 I71. 1,如圖 8 所示,S7 - 1200 的I71. 1 控制輸出 S7-1200 的 M60. 0。
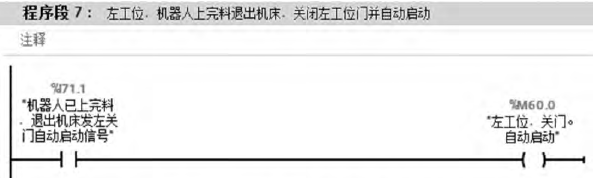
圖8 機械手控制系統輸入信號到S7-1200
如圖 9 所示,S7 -1200 調用 PUT 指令將 PLC 的M60. 0 的數據寫入左工位數控系統的 M60. 0 中。數控系統 M60. 0 控制關門并且啟動轉向節淬火程序。
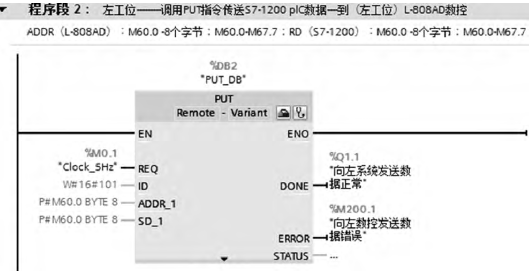
圖9 S7-1200寫入數控系統信號
4 、數控系統準停和端面定位功能設計
如圖 10 所示,由于轉向節特殊的結構,機械手進行上下料時需要轉向節的雙耳分別在下頂尖和撥桿兩側,這樣才不會磕碰下頂尖和撥桿。在上料時由機械手抓取位置和轉向節放置位置保證上料位置,在下料時轉向節的位置和上料時一致。
如圖 10 所示,在拖板上固定一個感性接近開關,當撥桿轉過接近開關時,接近開關信號輸入到數控系統輸入口,輸出給數控系統的 DB2900. DBX0. 1。
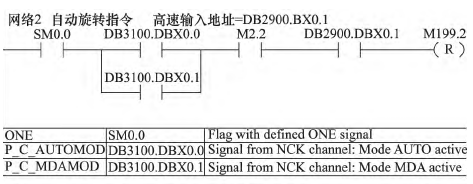
圖10 定向停程序圖
如圖 10 所示,當加工程序執行旋轉定向停后,M2. 2 接 通,當 下 頂 尖 轉 到 感 應 開 關 位 置 時,DB2900. DBX0. 1 信號有效,旋轉啟動信號 M199. 2 復位,旋轉準確停止。
用機械手進行上料時,為了避免遇到轉向節放在下頂尖,上頂尖對不齊的情況。轉向節先對齊上頂尖,保證其可以頂入上錐口,然后機械手下移把轉向節放入下頂尖,上頂尖在氣缸推動下始終頂緊轉向節。淬火機床對轉向節淬火時要保證感應線圈和轉向節端面的相對位置合適,因此設計了端面定位功能。采用端面定位,每次定位都是相對于轉向節端面,可以提高定位精度,對淬火效果也有利。如圖 11 所示,當數控加工程序運行到 M13 時,端面定位啟動。
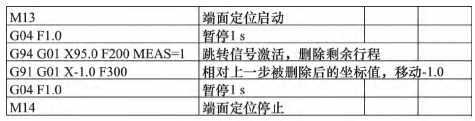
圖11 端面定位數控程序
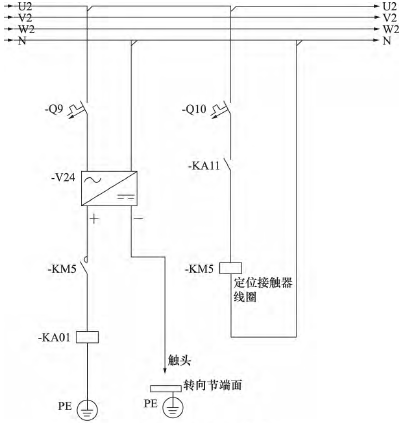
圖12 端面定位電氣圖
端面定位啟動后,數控系統輸出接通繼電器 KA11的線圈,如圖 12 所示,KA11 常開觸點接通,定位接觸器線圈 KM5 得電,常開觸點 KM5 閉合。當伺服電動機帶動拖板向上移動時,轉向節端面會與開關電源負端觸點接觸,回路接通,繼電器 KA01 線圈得電。繼電器 KA01 常開觸點閉合,此觸點連接數控系統的 I5. 7。
如圖 13 所示,I5. 7 接通后,輸出給數控系統的DB3200. DBX6. 2,從而數控加工程序的跳轉信號激活,如圖 11 所示,伺服電動機停止運行,從而拖板停止運行。
然后拖板向下后退設定行程便于感應加熱。
定位完成后,KA11 斷開。
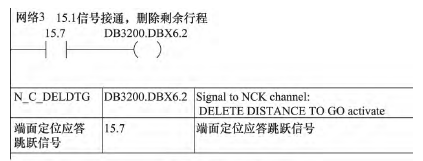
圖13 端面定位程
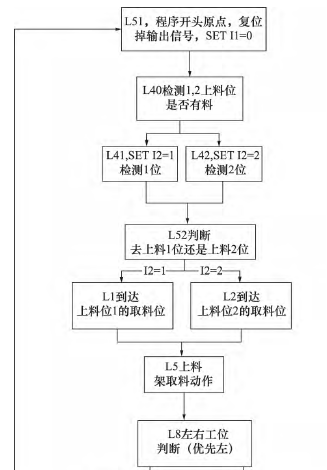
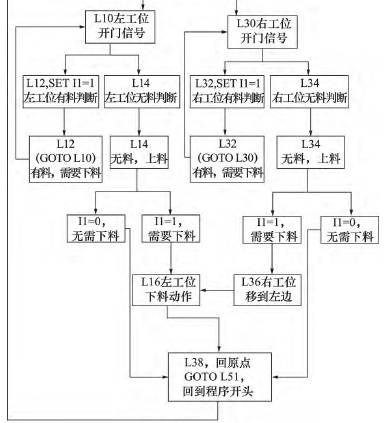
圖14 機械手動作流程圖
5 、機械手控制程序設計
機械手控制系統給出了示教編程所需的指令以及輸入輸出地址。通過示教編程控制機械手的動作流程,實現機械手自動上下料。上料位設置 2 個,下料位設置一個。機械手動作流程如圖 14
所示,Lx 是機械手的程序標簽。
6 結語
本文通過分析淬火機床與上下料機械手的控制流程,設計開發了淬火機床與上下料機械手控制系統。通過 S7-1200 溝通數控系統與機械手控制系統的交互信號,實現兩者的相互配合,機械手自動上下料以及機床自動淬火運行。通過調試及運行滿足了生產和工藝方面的要求。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

