



基于ANSYS的移動機器人底盤結(jié)構(gòu)穩(wěn)定性分析
2017-3-24 來源:上海大學(xué) 作者:高慧慧, 鮑晟,洪銀芳
摘要:以移動機器人自動打鉚系統(tǒng)為例,運用 UG 軟件對麥克納姆輪式移動機器人底盤結(jié)構(gòu)實體建模。 利用 ANSYS Workbench 軟件分析底盤結(jié)構(gòu)在四輪同時著地、單輪懸空和機械手臂末端反沖力 3 種工況下的靜態(tài)特性,得出不同工況下載荷分布對底盤結(jié)構(gòu)穩(wěn)定性的影響,為后續(xù)優(yōu)化設(shè)計提供重要依據(jù)。
關(guān)鍵詞:移動機器人 底盤結(jié)構(gòu) 有限元分析 穩(wěn)定性
隨著工業(yè)化的快速發(fā)展, 對于機器人技術(shù)的應(yīng)用研究越來越受到人們的重視和關(guān)注。 全方位移動機器人是機器人家族中靈活性更好、自主性更強、智能化更高的一員,在加工制造領(lǐng)域獲得越來越多關(guān)注[1]。 麥克納姆輪式全方位移動機器人具有平面內(nèi)的全部自由度, 能夠?qū)崿F(xiàn)橫向、 縱向的平移和繞任意中心點的旋轉(zhuǎn),可以在狹小空間靈活運動到達目標位置[2]。 與其它全方位移動機器人相比, 麥克納姆輪式全方位移動機器人在移動精度和承載能力等方面具有明顯的優(yōu)勢,適用于工業(yè)應(yīng)用需求。通過在麥克納姆輪式全方位移動機器人平臺上添加相應(yīng)的操作臂[3],增加了系統(tǒng)的柔性和適應(yīng)性 ,可以進行搬運、打鉚、裝配等工作,同時也對機器人的承載力、移動穩(wěn)定性和精確定位方面提出了更高要求。
底盤結(jié)構(gòu)是移動機器人最重要的承載部件, 承受著復(fù)雜的空間力和力矩作用[4]。 為確保移動機器人的移動精度和運行性能, 有必要采用有限元法對該底盤結(jié)構(gòu)進行靜態(tài)穩(wěn)定性分析[5],以驗證其可靠性 ,并為結(jié)構(gòu)優(yōu)化設(shè)計提供參考。
筆者基于 ANSYS Workbench 軟件,分析底盤結(jié)構(gòu)的靜態(tài)特性[6],通過分析底盤結(jié)構(gòu)在四輪同時著地 、單輪懸空、機械手臂末端反沖力 3 種工況下的穩(wěn)定性,得出不同工況下載荷分布對其穩(wěn)定性的影響, 并加以校核與優(yōu)化改進, 使其滿足麥克納姆輪式全方位移動機器人的精度和穩(wěn)定性要求。
1.移動機器人及底盤結(jié)構(gòu)
麥克納姆輪式全方位移動機器人由動力機構(gòu)、底盤結(jié)構(gòu)、升降系統(tǒng)、底盤、三點支撐等組成。電機驅(qū)動克納姆輪, 減速電機調(diào)節(jié)速度, 底盤結(jié)構(gòu)支撐整個車體,升降系統(tǒng)由螺旋升降組件提供動力,實現(xiàn)平臺的升降,底盤輔助支撐起到加工時穩(wěn)定車體作用。
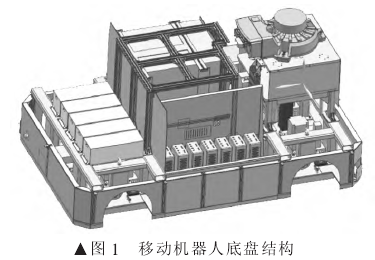
移動機器人底盤作為麥克納姆輪式全方位移動機器人的支撐機構(gòu),主要由兩組對稱主梁、兩對側(cè)梁以及上部結(jié)構(gòu)安裝板組成,如圖 1 和圖 2 所示,其結(jié)構(gòu)強度直接影響全方位移動機器人的移動精度和運行性能。
2.移動機器人底盤結(jié)構(gòu)模型建立
采用有限元軟件建立底盤結(jié)構(gòu)三維模型[7], 底 盤材料選取 Q235A。在 ANSYS Workbench 中對底盤模型進行自動劃分網(wǎng)格,單元格平均質(zhì)量為 83,滿足有限元分析的要求,劃分結(jié)果如圖 3 所示。
3.移動機器人底盤結(jié)構(gòu)穩(wěn)定性分析
對底盤結(jié)構(gòu)的穩(wěn)定性分析分為 3 種情況[8]:4 個輪子同時著地、單輪懸空、機械手臂末端反沖力的影響。
3.1 4 個麥克納姆輪同時著地工況分析
在 ANSYS Workbench 中對底盤結(jié)構(gòu)施加載荷,可將底盤受力看作恒等靜態(tài)載荷, 對其支撐面施加力約束,主要包括機器人自重(約280 kg)、電池自重(約150kg)、控制箱自重 (約 150 kg)、螺旋升降機構(gòu)和其它輔助機構(gòu)質(zhì)量( 約 60 kg,對底盤應(yīng)變影 響 微 小 ,分析時可忽略其大小)。施加載荷的相應(yīng)位置分別如圖 4 中的 B、C、D 所示。
在相應(yīng)平面和軸上施加約束條件[9]:對 4 個麥克納姆輪支撐平面進行固定約束和無摩擦約束, 施加位置如圖 4 中 A;在 ANSYS Workbench 中進行計算,得到該工況下的等效應(yīng)力和位移云圖, 得出底盤結(jié)構(gòu)的最大應(yīng)力、最大位移變形和位置,如圖 5 所示。
由 圖 5 可 見 ,底盤結(jié)構(gòu)等效最大應(yīng)力為 216.8MPa, 發(fā)生在底盤中間橫梁處 ; 底盤最大應(yīng)力變形為2.575 mm,發(fā)生在底盤中間橫梁位置靠近前輪處 ;可以得出該工況下最大應(yīng)力小于材料屈服強度 235 MPa,符合設(shè)計和使用要求。
3.2 單輪懸空工況分析
在路面不平時車輪會出現(xiàn)單輪懸空狀況, 難以保證底盤結(jié)構(gòu)的強度、精度和運行性能,因此有必要對該工況進行分析[10]。 底盤結(jié)構(gòu)呈左右對稱布置,分別以底盤右后輪、右前輪懸空兩種工況為例分析。
(1) 右后輪懸空工況。 底盤右后輪懸空時,在右后輪處不加任何約束, 對其余 3 個麥克納姆輪施加固定約束和無摩擦約束; 在 ANSYS Workbench 中分析計算,得到此工況下的底盤結(jié)構(gòu)等效應(yīng)力和總變形云圖,如圖 6 所示。 底盤等效最大應(yīng)力為 260 MPa,發(fā)生在底盤 中 間 和 前 兩 輪橫梁處,大于材料的 屈 服 強 度 235MPa,所以該工況比較危險 ,需要添加加強筋和橫梁減小應(yīng)力分布。 底盤最大變形為 2.88 mm,發(fā)生在不受約束的右后輪處。在底盤結(jié)構(gòu)后續(xù)的優(yōu)化時,需要添加橫梁或者改變尺寸減小變形。
(2) 右前輪懸空工況分析。 底盤右前輪懸空時,在右前輪處不加任何約束, 對其余 3 個麥克納姆輪施加固定約束和無摩擦約束;在 ANSYS Workbench 中分析計算, 得到該工況下的底盤結(jié)構(gòu)等效應(yīng)力和總變形云圖,如圖 7 所示。 底盤等效最大應(yīng)力為 255.03 MPa,發(fā)生在底盤中間和左前輪橫梁處, 大于材料的屈服強度235 MPa,因此該工況會 引起底盤的破壞 ,需要添加加強筋來減小應(yīng)力分布。 底盤最大變形為 4.35 mm,發(fā)生在底盤中間橫梁處和不受約束的右前輪處。 對底盤結(jié)構(gòu)后續(xù)的優(yōu)化,應(yīng)該改變尺寸或者添加橫梁減小變形。
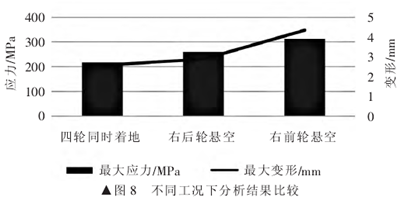
綜上所述,得出不同工況下的分析結(jié)果:從圖 8 可知, 全方位移動機器人在路面狀況良好時能夠正常工作,查閱設(shè)計手冊可知,結(jié)構(gòu)強度滿足使用要求;在單輪懸空時受力不理想, 底盤結(jié)構(gòu)出現(xiàn)較嚴重的扭轉(zhuǎn)變形,應(yīng)盡量避免這種情況。
4.機械手臂末端反沖力對底盤穩(wěn)定性的影響
以機器人鉆鉚加工應(yīng)用為例,在鉆鉚過程中,機械臂末端反沖力引起的力和力矩對底盤結(jié)構(gòu)的穩(wěn)定性會造成影響,因此,分析機械手臂反沖力的影響也是至關(guān)重要的[11-12]。
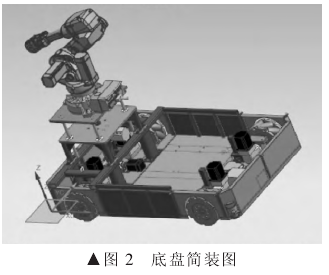
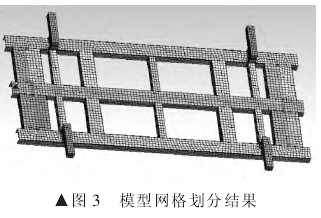
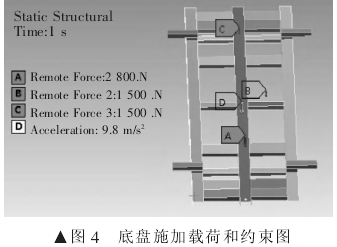
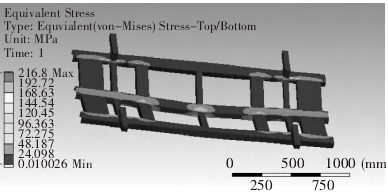
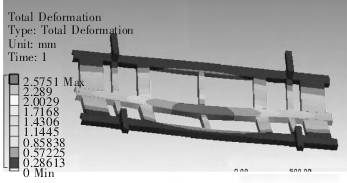
圖 5 底盤結(jié)構(gòu)等效應(yīng)力和總變形云圖
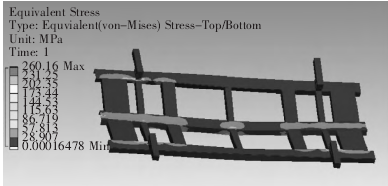
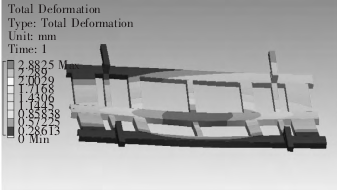
圖 6 底盤結(jié)構(gòu)等效應(yīng)力和總變形
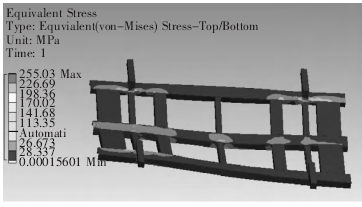
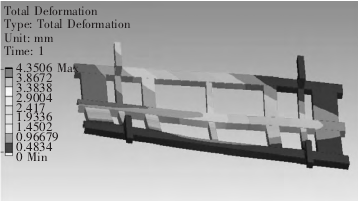
圖 7 底盤結(jié)構(gòu)等效應(yīng)力和總變形云圖
以移動工業(yè)機器人自動打鉚系統(tǒng)為例, 根據(jù)機械臂型號和鉚槍型號,由實驗估計機械手臂反沖力在30~5 000 N 范圍內(nèi)變化,機器人手臂末端距離底座高度約為 1 300 mm, 可以計算出反沖力引起的附加力矩在39~6 500 N·m 范圍內(nèi)變化。
分析最大反沖力 F=5 000 N 對移動機械手臂底盤結(jié)構(gòu)穩(wěn)定性的影響。 經(jīng) ANSYS Workbench 分析計算,得到底盤結(jié)構(gòu)的等效應(yīng)力和總變形云圖,如圖 9 所示。危險位置發(fā)生在底盤中間橫梁處, 底盤等效最大應(yīng)力為 243.63 MPa,大于材料的屈服強度極限 235 MPa,底盤結(jié)構(gòu)嚴重扭轉(zhuǎn)變形。 底盤最大變形為 0.866 mm,發(fā)生在底盤中間橫梁并靠近后輪位置。
由實驗數(shù)據(jù)得出結(jié)論: 當機械手臂末端的反沖力小于 5 000 N 時, 底盤結(jié)構(gòu)的應(yīng)力和位移變形滿足強度要求;當反沖力大于 5 000 N 時,底盤結(jié)構(gòu)出現(xiàn)嚴重扭轉(zhuǎn)變形,穩(wěn)定性受到嚴重影響,全方位移動機器人不能正常工作,需要對底盤結(jié)構(gòu)進行后續(xù)的優(yōu)化與改進。
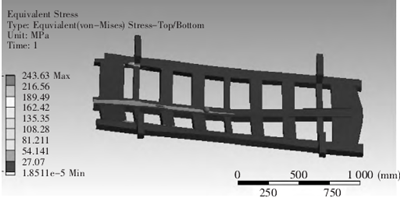
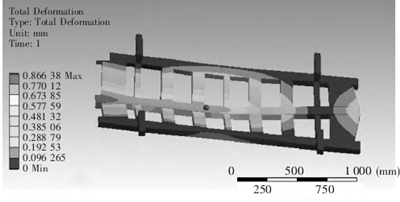
圖 9 底盤結(jié)構(gòu)等效應(yīng)力云圖和結(jié)構(gòu)總變形圖(F=5 000 N)
5.總結(jié)
分析了底盤結(jié)構(gòu)在四輪同時著地、 單輪懸空和機械手臂末端反沖力 3 種工況下的穩(wěn)定性, 得出最大應(yīng)力和最大變形的位置,理論分析結(jié)果與實際情況相符,驗證了有限元分析的正確性。實驗證明,該底盤結(jié)構(gòu)的強度和變形完全符合實際要求, 單輪懸空工況由于會導(dǎo)致較大扭轉(zhuǎn)形變,應(yīng)盡量避免;根據(jù)本文分析的數(shù)據(jù)以及最大應(yīng)力及變形的位置, 為后續(xù)底盤結(jié)構(gòu)的優(yōu)化設(shè)計與完善提供了重要依據(jù); 對后續(xù)的移動機械臂系統(tǒng)的關(guān)鍵結(jié)構(gòu)的優(yōu)化分析提供了借鑒和保障。
投稿箱:
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年7月 新能源汽車銷量情況
- 2025年7月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年7月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年7月 軸承出口情況
- 2025年7月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年7月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年6月 新能源汽車銷量情況
- 2025年6月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年6月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年6月 軸承出口情況
- 2025年6月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年6月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年5月 新能源汽車銷量情況