



軟體機器人結構機理與驅動材料研究綜述
2017-1-12 來源:浙江大學工程力學系 作者:李鐵風 李國瑞 梁藝鳴 程聽雨楊栩旭黃志
摘要:軟體機器人是一類新型機器人,具有結構柔軟度高,環境適應性好,親和性強,功能多樣等特點,有著十分廣闊的研究和應用前景. 智能材料在軟體機器人結構設計及實際應用中扮演了重要的角色,其特殊的驅動機制極大拓展了軟體機器人的功能. 介紹了軟體機器人的發展和研究現狀,按其應用場合及功能總結了幾種典型的軟體機器人. 從仿生機理的角度,介紹了蠕蟲、彎曲爬行蟲、魚類游動等幾類仿生運動機理以及其相應的軟體機器人. 還按不同驅動類型將軟體機器人歸納為氣動、形狀記憶合金、離子交換聚合物金屬復合材料、介電高彈體、響應水凝膠、化學燃燒驅動等類型. 介紹了軟體機器人的制作方法與工藝,分析了目前軟體機器人研究的主要挑戰,提出對未來研究的展望.
關鍵詞:軟體機器人,智能材料,仿生機理
0.引言
隨著人類生產生活的不斷發展,機器人學、自動控制理論的不斷進步,人類對于機器人技術的需求不斷提升. 在人類不宜涉足的極端和危險的工程環境中,機器人為人類提供了很大的便利[1]. 傳統的機器人結構通常由電機、活塞、關節、鉸鏈等構件組裝而成,盡管動力足、功率大、性能成熟,但是也存在很多缺點,例如笨重、安全系數低、環境適應性差、可靠性低、傳動效率低下、噪聲大等. 自然界生物的柔軟的身體、優良的靈活性和強大的環境適應性為機器人的發展提供了新思路. 軟體機器人以自然界的軟體生物為原型,其軀體主要由可以承受大變形的彈性材料構成,可以連續地變形,具有極高的自由度. 通過模仿軟體動物的運動,這種機器人可以實現蠕動、扭轉、爬行、游動等運動形式[2]. 軟體機器人可以根據實際需要任意地改變自身形狀和尺寸,在更加復雜的環境中作業. 此外,相比于傳統的硬質機器人,軟體機器人具有更高的安全性和更好的環境相容性,更加適合服務業和醫療領域. 基于以上優點,軟體機器人在工業生產、醫療服務、軍事偵察等領域都有著很好的潛力.
智能材料是指在電、光、熱、催化劑等外界激勵下表現出特有功能響應的材料[3-7]. 這些功能響應可以是變形、化學反應、熒光等. 近年來,智能材料在機器人領域扮演了重要角色,例如氣動、shapememory alloy (SMA)、ionic polymer metal composite(IPMC)、dielectric elastomer (DE)、響應水凝膠機器人等. 目前,智能材料在機器人方面已經得到了很好的應用,由智能材料驅動的軟體機器人具有靈活、體積小、質量輕、環境適應性好、噪聲低等優勢.
本文介紹了軟體機器人的研究現狀、結構機理、驅動類型、結構成型,分析了其中的技術難點并對未來的研究做出了展望.
1.研究現狀
軟體機器人是一種新型的機器人,是機器人研究的拓展. 軟體機器人具有良好的靈活性、環境適應性,在工業生產、醫療服務、軍事探測等方面具有廣闊的應用前景,軟體機器人已經成為了機器人領域的研究熱點. 目前,科學家們對軟體機器人的研究仍處于初步階段. 現有的軟體機器人按照結構機理可分為:(1) 撲翼式[8-14]、擺尾式[15-17]、噴射式水中機器人[18-21],(2) 蠕動式[22-27]、彎曲爬行機器人[28-33],(3) 抓取機器人[34-38] 和(4) 跳躍機器人[39-40] 等.2007 年,美國國防部高等研究計劃局(DARPA)提出化學機器人Chembots 的研究計劃,并由塔夫斯大學(Tufts University) 承擔. 該化學機器人結合了機器人學和材料化學,采用軟材料制成,甚至呈現液態狀,可以自由變形,穿越狹窄的孔隙[41]. 在歐洲委員會的資助下,歐洲5 個國家的研究機構成立了“章魚觸手” 項目組. 該項目于2009 年2 月啟動,2013 年完成,主要是開發軟體水下章魚機器人原型,研究章魚機器人的傳感、驅動和相應的控制方法[42-44]. 塔夫斯大學Barry A. Trimmer 研究組在DARPA 的資助下研發的GoQBot 機器人[28] 以彎曲爬行蟲為原型,由形狀記憶合金(SMA) 驅動,能夠實現爬行,翻滾等運動形式. 麻省理工學院、哈佛大學和韓國漢城國立大學合作研發的Meshworm 機器人[22] 由形狀記憶合金絲驅動,可以模仿蚯蚓的蠕動. 哈佛大學的GorgeM. Whitesides 研究組研發了一系列氣動軟體機器人[23;34-35;45-46]、內燃驅動軟體機器人[39-40],可以實現爬行、跳躍、抓取等運動形式. 此外還有康奈爾大學的集可發光人造皮膚與充氣結構為一體的軟體機器人[24] 等. 日本岡山大學的仿蝠鲼軟體機器魚也采用氣動的驅動方式[9],可以實現直行和轉彎. 在響應凝膠驅動方面,日本早稻田大學采用自震蕩響應凝膠研發了仿生尺蠖[29],可以在無外界激勵條件下實現周期性伸縮運動. 弗吉尼亞大學仿生工程實驗研發的仿生蝠鲼機器魚則用IPMC 驅動[10],可以實現多種運動模式.
2.結構機理
軟體動物的結構和運動形式為軟體機器人的設計提供了很好的參考. 現有的軟體機器人主要分為爬行機器人、游泳機器人、抓取機器人以及跳躍機器人. 其中爬行機器人包括蠕動機器人、彎曲爬行機器人,游泳軟體機器人包括仿生撲翼式軟體機器魚、波動鰭軟體機器魚、擺尾式軟體機器魚、仿生烏賊和仿生水母等,抓取機器人包括抓持式機器人、電吸附式機器人,跳躍機器人有單足跳躍機器人、
多足跳躍機器人等. 本章將對各類不同結構機理的軟體機器人歸納分類.
2.1 蠕蟲和彎曲爬行蟲
蠕蟲的軀體是典型的流體靜力骨骼(hydrostaticskeleton) 結構,由表皮、肌肉、體液和神經系統組成.以蚯蚓為例,它的肌肉屬于斜紋肌,肌肉構成封閉的體腔,內部充滿體液,形成靜水骨骼結構. 蚯蚓的肌肉占全身體積的40%,由環肌和縱肌組成. 當某個體節縱肌收縮時,該體節直徑增大,當環肌收縮時,該體節的直徑減小,長度增大. 蚯蚓就是通過各個體節之間的肌肉收縮產生的行進波來實現向前的運動.麻省理工學院仿生機器人實驗室首先采用SMA 作為驅動器開發出仿生蚯蚓機器人Meshworm[22]. 蚯蚓和Meshworm 的身體結構分別如圖1(a) 和圖1(b)所示.
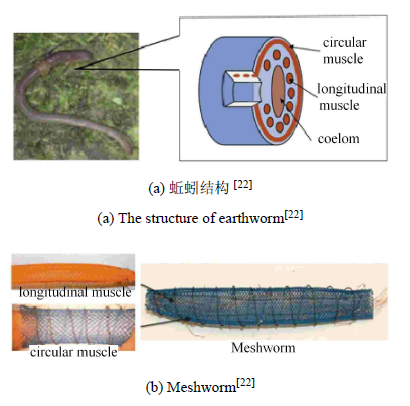
圖1 蚯蚓身體結構和Meshworm
彎曲爬行蟲的軀體結構也屬于流體靜力骨骼結構,其肌肉組織包含斜肌、縱肌以及小塊肌肉,構成了復雜的肌肉組織. 通過控制腳和基底之間的壓力變化和身體的張力,它可以實現向前的爬行運動和穿越障礙. 塔夫斯大學Barry A. Trimmer 實驗室研發的仿生毛蟲機器人GoQBot[28],由SMA 驅動,能夠實現爬行、翻滾等運動形式,彎曲爬行蟲和GoQBot的身體結構分別如圖2(a) 和圖2(b) 所示.
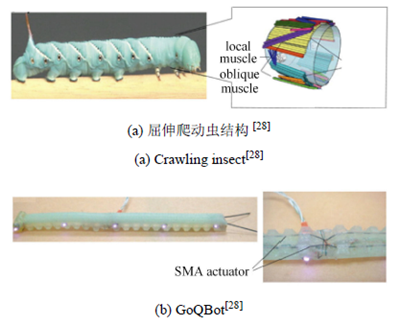
圖2 彎曲爬行蟲和GoQBot
2.2 水中機器人
按照游動方式,水中生物的運動方式可以分為撲翼式(蝠鲼)、尾鰭擺動式以及噴射式(烏賊、水母).擺尾式機器魚通過自身肌肉的交替伸縮實現身體的擺動,從而帶動尾鰭周期性擺動獲取水動力實現推進. 擺尾式魚類以及麻省理工學院開發的軟體機器魚[15] 如圖3(a) 和圖3(b) 所示. 典型撲翼式魚為蝠鲼,它們通過胸鰭周期性的撲動實現推進,撲翼魚類以及北京航空航天大學開發的仿生機器魚[8] 分別如圖3(c) 和圖3(d) 所示. 水母通過收縮外殼的方式擠壓內腔,可以改變自身內腔的體積,實現噴水推進. 自然界中的水母與弗吉尼亞理工大學開發的SMA 驅動的軟體機器水母[18] 分別如圖3(e) 和圖3(f)所示.
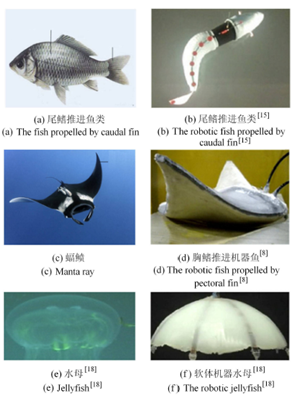
圖3 水中生物原型和軟體水中機器人
2.3 其他
此外,軟體機器人類型還有跳躍式機器人[39-40]、軟體抓取結構[34-38]、行走機器人[47-48]以及滾動機器人[49] 等. 這幾類機器人的驅動機制,受到自然界中例如蝗蟲和跳蚤蓄力爆發跳躍(跳躍式機器人),章魚多觸手變形抓取(軟體抓取結構),甲殼蟲多足爬行(行走機器人) 等原型啟發. 這些機器人的結構機理與驅動行為將在下一章中具體介紹.
3.驅動類型
3.1 氣動軟體機器人
氣動軟體機器人是指通過在結構中充氣,利用氣壓使結構產生變形或者運動,從而實現驅動的一類軟體機器人. 哈佛大學George M. Whitesides 研究組研發出了充氣式蠕動軟體機器人[23],如圖4(a) 所示. 該軟體機器人身長約12.7 cm,通過充氣產生運動,可以穿越障礙,進入狹小空間,并且具備很強的抗沖擊性能. 該團隊還研發了充氣式驅動器[45]、抓取機器人[34-35] 等等. 康奈爾大學的Larson 等[24] 開發了一種拉伸性能很好且具有電致發光功能的人造皮膚,并將這種電子皮膚整合到充氣式軟體機器人中,展現了軟體機器人在運動過程中的發光效果見圖4(b). Brown 等[36] 研發的球形軟體抓手,通過抽氣改變氣壓的方式實現抓取,如圖4(c) 所示.
日本岡山大學研發了氣動軟體機器魚[9],如圖4(d) 所示. 該機器魚模仿蝠鲼的外形和推進機理. 該機器魚的軀體材料為硅橡膠,體長為150mm,體寬為170mm,通過氣動閥進行驅動,最大游動速度可達100mm/s. 北京航空航天大學機器人研究所研發了一款氣動仿生蝠鲼機器魚[8]. 該機器魚的主體為硅橡膠,翼展560mm,身長320mm,最大游動速度為0.5 倍身長每秒. 氣動機器人具有變形大、運動靈活等優點,但是需要面臨氣源、控制等方面的挑戰.
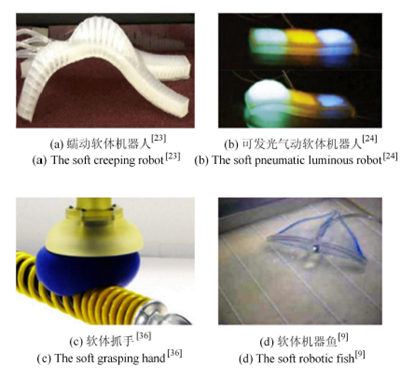
圖4 氣動機器人
3.2 形狀記憶合金軟體機器人
形狀記憶合金(SMA) 是一種智能合金材料,在加熱時能夠恢復原始形狀,消除低溫狀態下所發生的變形. 形狀記憶合金的熱力耦合行為源于材料本身的相變,例如熱彈性馬氏體相變. 在形狀記憶合金中存在兩種相,高溫相奧氏體相和低溫相馬氏體相.馬氏體一旦形成,就會隨著溫度下降而繼續生長,如果溫度上升它又會減少,以完全相反的過程消失.兩項自由能之差作為相變驅動力,兩項自由能相等的溫度T0 稱為平衡溫度. 只有當溫度低于平衡溫度T0 時才會產生馬氏體相變,反之,只有當溫度高于平衡溫度T0 時才會發生逆相變. 在SMA 中,馬氏體相變不僅由溫度引起,也可以由應力引起,這種由應力引起的馬氏體相變叫做應力誘發馬氏體相變,且相變溫度同應力正相關. 形狀記憶合金可以用于智能材料驅動器中.
Menciassi 等[25] 首先將SMA 驅動器應用于蠕蟲的仿生機器人中,如圖5(a) 所示. Menciassi 參考了蚯蚓的運動機制,將SMA 彈簧嵌入硅橡膠外殼中并串聯成竹節狀,配置好各節的驅動電流,運動速度可達0.22mm/s. 模仿生物爬行的軟體機器人還有Du 等研發的3 種模式運動機器人[30],GoQBot 機器人[28],Meshworm 機器人[22]. Kim 等[11] 研發了一種通過SMA 驅動的仿生海龜,如圖5(b) 所示. 它的最高游動速度為22.8mm/s. 此外,該研究組研發了一

圖5 SMA 驅動機器人
款新型的SMA 仿生龜[12],其最大游動速度為11.5 cm/s. Wang 等[16] 設計了一種SMA 驅動的柔性鰭單元,如圖5(c) 所示,并將其應用于仿蝠鲼機器人[13] 中,如圖5(d) 所示. 文獻[18-19] 模仿水母的運動,制作了可做沉浮運動的水下機器人. 此外,SMA還被應用于攀爬機器人[31],仿生飛行器[50-51],機器人面部表情驅動[52-53] 等.形狀記憶合金驅動的機器人具有大驅動力、大驅動位移等優點,但是也存在溫度難以控制、驅動頻率低等問題.
3.3 IPMC 軟體機器人
IPMC 的全稱是離子交換聚合物金屬復合材料,是一種電致變形的智能材料(離子型). IPMC 材料由Nafion 鋰子交換薄膜和電極組成. 在含水狀態下,聚合物薄膜中的陽離子(例如鈉離子和鈣離子)可以自由移動,陰離子固定在碳鏈中不能移動. 在IPMC 電極的兩端施加上電壓時,在電極之間會產生電場. 在電場的作用下,水合的陽離子向負極移動,而陰離子的位置固定不變. 從而導致IPMC 的負極溶脹,正極收縮而導致IPMC 彎曲變形.IPMC 具有變形靈活、可重復,大位移,低電壓驅動,響應速度快等特點. 基于IPMC 的這些特點,可以廣泛地用于智能材料機器人的驅動器中,尤其適用于水環境機器人,如仿生機器魚、機器水母等.
Hubbard 等[14] 將IPMC 應用于仿生機器魚中,用于驅動機器魚的胸鰭和尾鰭. 該機器魚的最大游動速度為28mm/s,如圖6(a) 所示. Shen 等[17] 模仿鯨魚的游動方式,使用IPMC 尾鰭研發了一款仿生機器魚,并研究了其水動力性能,如圖6(b) 所示. 弗吉尼亞大學仿生工程實驗室研發了一款IPMC 驅動的仿生蝠鲼機器魚[10],如圖6(c) 所示. 該機器魚的胸鰭由兩側的4 根IPMC 鰭條驅動,身長80mm,翼展180mm,最大游動速度為4.2mm/s. 弗吉尼亞理工大學將IPMC 驅動器嵌入聚烯烴薄膜中,開發出透明軟體水母[20],如圖6(d) 所示. 該水母的直徑為164mm,高為50mm,重量為11 g,游動速度為1.5mm/s. 此外,伊朗沙力夫理工大學研發了一款IPMC 驅動的滾動機器人[49],如圖6(e) 所示. 德克薩斯A&M 大學研發了一款IPMC 驅動的行走機器人[47],如圖6(f) 所示. IPMC 驅動的機器人具有大輸出位移、運動靈活等優點,而其主要不足有輸出力較小,響應頻率低、材料需要液體環境等.

圖6 IPMC 機器人
3.4 介電高彈體軟體機器人
介電高彈體(DE) 是一種典型的電致變形智能軟材料(電子型). 聚丙烯酸類材料是一種典型的介電高彈體材料,在介電高彈體薄膜的兩側覆蓋柔性電極,并施加驅動電壓時,介電高彈體薄膜在電場力的作用下產生變形,導致厚度減小,面積擴張. 介電高彈體具有彈性模量低、質輕、能量密度大、響應速度快的優點. 介電高彈體可用于軟體機器人驅動、柔性傳感器、智能穿戴設備以及能量采集等.浙江大學工程力學系、浙江省軟體機器人與智能器件研究重點實驗室研究組基于介電高彈體的力電耦合特性,通過利用力電失穩實現了材料的極大電致變形[54],并可振動調頻,能用于智能結構的驅動[55].此外,該研究小組還參考了彎曲爬行蟲,海星等無脊椎動物,研發了一種小型的智能結構[32],如圖7(a) 所示. 以該結構作為基本模塊,可以制成多種形狀的小型機器人. 在不同的預拉伸狀態下以及不同的電壓的驅動下,這種機器人的運動幅度也會隨之改變. Kofod 基于介電高彈體材料做了三角狀抓手[38],可以抓起輕質的柱狀物體,如圖7(b)所示. Jung 等[26] 以蠕蟲為靈感,做成以介電材料為單元的驅動器,再以6 個基本單元為一組,做成一個二級的圓形單元,最后這種二級的圓形單元可以連接成任意長度的蠕蟲機器人,可以實現1mm/s的爬行速度,如圖7(c) 所示. Choi 等[56] 將多層介電材料薄膜制成的驅動器作為基本結構單元,以這種單元為基礎組裝成管狀的智能機器人,如圖7(d)所示. Pei 等[48] 基于介電高彈體材料,做成圓柱形驅動器單元,并組裝成六足行走機器人或者首尾連接的蠕蟲機器人,如圖7(e) 所示. Zhao 等[57] 研發了一種撲翼結構,這種馬鞍形狀的介電材料的驅動器在5 000V,3 Hz 的驅動電壓下,可以實現大于180。的角度變化,如圖7(f) 所示. 這種撲翼結構也為空中飛行驅動器提供了一個很好的參考. 此外,Conn 等[27] 研發了一種結合氣動與電動并以介電高彈體為材料的蠕蟲機器人. 這種機器人是以介電高彈體薄膜封裝的一個圓筒形結構為單元,并且可以將這些單元連接成不同長度的機器人. 該機器人在充氣后,介電薄膜進入工作狀態,施加電壓后可以通過底部的運動結構產生的摩擦力前進. Branz等[58] 研發了一種以介電高彈體為基本材料的雙
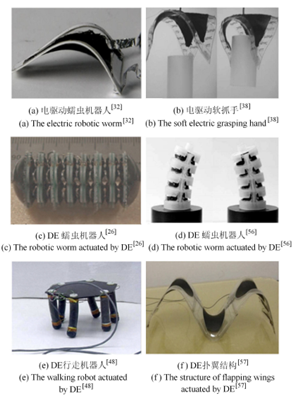
圖7 DE 驅動機器人
軸機器人,這種機器人在水平x-z 方向和豎直x-y 方向分別有兩個圓柱形的軸,在電的驅動下,介電薄膜會發生形變,帶動兩個軸運動,從而實現前進. Shintake等[37] 開發了一種電吸附式的介電高彈體軟體抓手,可以抓起82.1 g 的物體. 介電高彈體機器人具有大驅動力、大驅動位移等優點,但也面臨著驅動電壓高等挑戰.
3.5 響應水凝膠軟體機器人
水凝膠是由親水性的功能高分子,通過物理或化學作用交聯形成三維網絡結構,吸水溶脹而形成.響應水凝膠指能夠對外部環境的變化產生響應性變化的水凝膠,如一些水凝膠能因外界溫度、pH 值、光電信號、特殊化學分子等的微小變化,而產生相應的物理結構或化學結構的變化. 如一類具有低臨界相轉變溫度(LCST) 的溫敏水凝膠,其在溫度低于LCST 時,表現為親水性,而高于LCST 時相轉變為疏水性. 水凝膠高分子網絡的相轉變使得水凝膠中的水分大量出入其中(溫度升高縮水,降低吸水),從而使得水凝膠產生體積等形態變化. 又例如一類具有對酸堿度敏感的水凝膠,其高分子網絡中含有可電離的陰離子基團(羧基、磺酸基等) 或陽離子基團(氨基等),外界pH 值的改變影響這些基團的電離情況,使得它們與水分子的結合情況也發生相應的改變,從而使水凝膠的體積形態隨著pH 值的改變而發生變化. 由于智能水凝膠能夠隨外界環境變化,而產生形變,其可以作為智能驅動材料應用于柔性機器人驅動等領域[59].
Nakamaru 等[29] 以凝膠為材料,研發了一種外形簡單,有著類似蠕蟲的運動模式的仿生機器人. 這種機器人在不改變外界驅動方式和刺激的情況下可以自己通過自震蕩的方式移動,如圖8(a) 所示. Morales等[33] 研發了一種以水凝膠為基底的片狀驅動器. 該驅動器分為兩部分,分別作為機器人的兩只腳,這兩只腳分別為陰離子腳和陽離子腳,通過改變電極的方向使機器人產生不同方向的形變從而使其移動,如圖8(b) 所示. Lee 等[60] 同樣是以水凝膠作為基本材料,以自然界中的捕蠅草為靈感,制備了一種表面具有微流道的微型機器人,可以通過機器人表面的微流道吸水和失水時所產生的表面形變來使其運動.此外,Li 等[20] 用pH 值響應水凝膠開發了一款軟體水母,該水母為磁驅動. 水凝膠機器人能夠通過自身化學反應實現運動,但是面臨驅動力小、難以精確控制的挑戰.
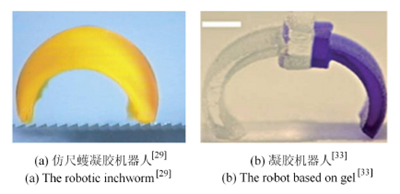
圖8 水凝膠機器人
3.6 內燃軟體機器人
Shepher 等[39] 研究組研發了一種三角狀的有機彈性體機器人. 該機器人以甲烷與氧氣燃燒反應使氣體體積膨脹為驅動機制,在分別通入純氧和甲烷混合反應之后,這種機器人可發生形變并且跳躍,最高可達到跳離地面300mm (30 倍身高),如圖9(a)所示. 同樣是以跳躍為運動形式,Bartlett 等[40] 應用三維打印技術制造了一種內燃驅動機器人. 該機器人也是以化學反應放能作為驅動機制,丁烷和氧氣在一個三角狀的密閉腔室里發生反應,使這個小型機器人跳躍,并且可以通過給底部的腳分別充氣實現定向的跳躍,如圖9(b) 所示. 內燃機器人具有驅動力大,運動幅度大的優勢,但是存在著控制難度大的挑戰.
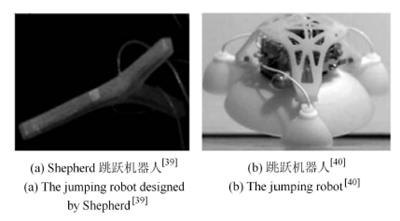
圖9 內燃機器人
4.結構成型
軟體機器人的制造包括了機器人本體結構制造、驅動材料制造、柔性電子電路制造. 文獻[2, 61]總結了軟體機器人的制造工藝,包括了形狀沉積、納米壓印、激光消融、微注射成型、3D 打印等.圖10 為形狀沉積法(shape deposition manufacturing,SDM) 的流程示意圖. Merz 等[62] 早在1994 年就詳述了SDM 的具體實施步驟. 21 世紀初,MarkCutkosky 研究組最早將SDM 應用于機器人的結構制造[63]. 運用形狀沉積法,可以把傳感器、電路組件嵌入結構中,制作柔軟的結構并使其具備多種功能.
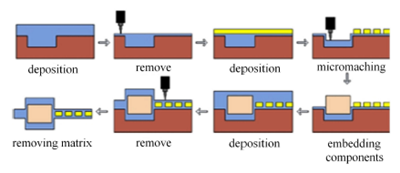
圖10 SDM 工藝流程圖
介電高彈體驅動器涉及的主要制造工藝包括聚合物薄膜的制作、薄膜的預拉伸、電極的集成和封裝等. 如圖11 所示,薄膜可用注模、旋涂、3D 打印制造或使用膠帶(VHB, 3M),使用掩模、轉印或濺射沉積法使電極均勻覆蓋于薄膜兩側. 柔性電極的集成是DE 驅動器制造的關鍵步驟. 在可伸展電子系統中,結構發生變形如拉伸、扭轉、折疊時,系統的電力和機械耗散應盡可能小. 這就要求電極有一定的柔順度、良好的傳導率甚至特定的外觀. 使用柔性電極在介電高彈體表面制備具有特定形狀的導電區域,可以實現通過二維平面制造對智能結構三維形狀的驅動控制[64].
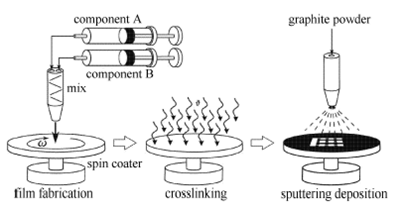
圖11 DE 驅動器制造流程
Rosset 等[66] 綜述了應用于DE 驅動器的柔性電極及其集成方法. 常用的柔性電極有石墨粉、碳膏、銀納米線等. Keplinger 等[67] 將水凝膠作為電極應用于DE 驅動器制造,制造的驅動器高度透明. 可運用于對外觀有相關需求的地方.以Gorge M. Whitesides 為主發展的軟刻蝕(softlithograph) 技術[68] 使用彈性模板為微圖案的轉移中介,包括了微接觸印刷、近場光刻蝕、納米壓印等. 彈性模板是軟刻蝕技術的核心元件,聚二甲基硅氧烷是優良的制備材料,其具有彈性優良和不與其他材料粘連的特點,能實現在曲面上制作圖案. 文獻[23]和文獻[39] 中的軟體機器人制造都采用了軟刻蝕方法.
3D 打印(3D printing) 也可稱為增材制造(additivemanufacturing, AM),具有數字制造、直接制造、快速制造等優點. 目前已經實現商品化的工藝主要有光固化打印、選擇性激光燒結打印、熔融沉積打印.利用3D 打印已用于制造軟體機器人的軀體[40;69-70].Rossiter 等[71] 采用噴射打印方式,利用UV 光逐層照射固化聚丙烯酸樹脂得到一塊厚度約90 1m 的可驅動的DE 薄膜. Carrico 等[72] 采用熔融沉積技術制造了IPMC 薄片(圖12),并與商用IPMC 進行了性能比較. Peele 等[73] 采用光固化技術制造了一個氣動模塊.
5.關鍵技術與挑戰
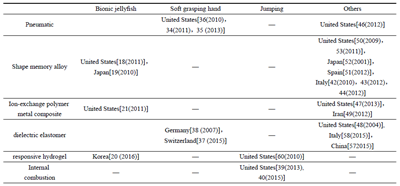
表1 和表2 從驅動方式、結構機理以及研發機構所在地的角度歸納了多種已有的軟體機器人. 軟體機器人的研究目前尚處于起步階段,仍有很多難題需要去解決,包括能源供給、運動學建模、動作控制及通訊傳感等. 首先,軟體機器人具有極高的自由度,因此在建模與控制方面與傳統的機器人有所不同,難以實現精確建模與控制. 目前,在軟體機器人動力學建模中,主要通過結構功能分類進行多體離散化,通過將實驗與模型驗證,并充分考慮控制對步態的影響,從而優化機器人構造,提升性能[74-76]. 開
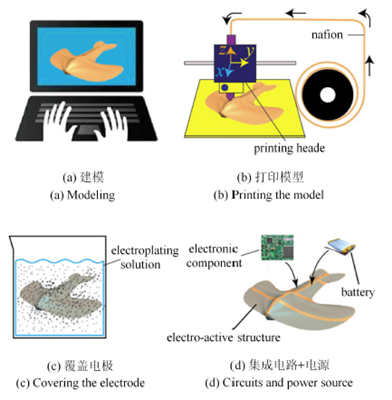
圖12 熔融沉積技術制造IPMC[72]
發適用于軟體機器人大變形、高自由度等特點的控制策略及建模方法對其基礎研究及實際應用非常關鍵. 其次,軟體機器人的進步在很大程度上依賴高性能的智能軟材料制備及結構成型. 需要研發高能量密度、高效率、可大變形驅動、寬頻率驅動并且易于成型的智能軟材料. 最后,研究開發面向軟體機器人應用的能源供應裝置也是其發展的關鍵. 例如氣動式軟體機器人、電源以及氣源的質量較大,影響了機器人的運動. 例如介電高彈體驅動的軟體機器人,小型高壓電源的可靠性至關重要. 軟體機器人的電源要求延展性好、輕質、可攜帶.
表1 各類軟體機器人按結構形式、驅動方式及研究國家統計表(I)
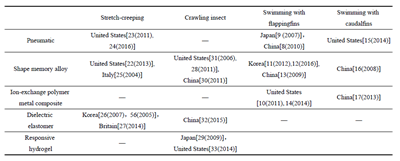
表2 各類軟體機器人按結構形式、驅動方式及研究國家統計表(II)
6.展望
由于軟體機器人要求通訊、控制電路等可以承受大變形,因而柔性電子的許多研究成果可以大量應用在軟體機器人結構中,提升其性能. 而軟體機器人的研究同時也對柔性電子技術提出了新的應用要求,并開拓了新的應用領域. 軟體機器人因為其復雜的、軟體化的結構特性,從而十分適合使用三維打印成型技術制備,同時也為三維打印成型技術提供了新的應用領域.
未來軟體機器人的研究及應用,將利用到多個學科的前沿成果,以實現高柔軟性、多功能化、高親和度等性能特點;利用柔性電子、三維打印等結構與成型技術,使其易于制造,從而廣泛應用于各類工程、醫療、軍事等領域.
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

