



摘要:為實(shí)現(xiàn)滾動(dòng)導(dǎo)軌副的快速分析,以完成高效設(shè)計(jì),針對滾動(dòng)導(dǎo)軌副的結(jié)構(gòu)特征,提出一種基于ANSYS APDL參數(shù)化設(shè)計(jì)語言的滾動(dòng)導(dǎo)軌副的有限元快速建模方案。根據(jù)滾動(dòng)導(dǎo)軌副的結(jié)構(gòu)特征,采用從端面到實(shí)體、端面網(wǎng)格到實(shí)體網(wǎng)格的方法;針對構(gòu)件特征,采用八節(jié)點(diǎn)六面體單元solid185。該建模方法在滾動(dòng)導(dǎo)軌副嚙合特性分析中的應(yīng)用表明,所建滾動(dòng)導(dǎo)軌副參數(shù)化有限元模型具有通用性強(qiáng)、可移植性好、單元?jiǎng)澐挚煽匦院谩⒕W(wǎng)格易于調(diào)整等優(yōu)點(diǎn),可作為多種分析類型的基礎(chǔ)模型。
1. 緒論
滾動(dòng)直線導(dǎo)軌副以其精密的直線導(dǎo)向作用、高承載、高速度、高精度、低磨損以及高剛性等特點(diǎn),廣泛應(yīng)用于各類數(shù)控裝備及自動(dòng)化生產(chǎn)線等領(lǐng)域。特別是在裝備制造業(yè)上,滾動(dòng)導(dǎo)軌副已成為數(shù)控機(jī)床、自動(dòng)化設(shè)備的關(guān)鍵元件,其性能直接決定設(shè)備的好壞。隨著機(jī)床行業(yè)全面向高精尖方向發(fā)展,這也對滾動(dòng)導(dǎo)軌副的設(shè)計(jì)開發(fā)提出了更高的要求:不僅需要可以快速完成滾動(dòng)導(dǎo)軌副的結(jié)構(gòu)設(shè)計(jì),同時(shí)更需要驗(yàn)證結(jié)構(gòu)設(shè)計(jì)的合理性及是否可以達(dá)到設(shè)計(jì)目標(biāo)。因此必須對其進(jìn)行靜力學(xué)、動(dòng)力學(xué)性能分析,為滾動(dòng)導(dǎo)軌副的性能優(yōu)化設(shè)計(jì)提供重要依據(jù)。
由于滾動(dòng)導(dǎo)軌副包含滑塊、導(dǎo)軌、返向器及多個(gè)滾動(dòng)體,導(dǎo)致影響因素較多。用傳統(tǒng)理論對其進(jìn)行動(dòng)、靜力學(xué)分析較為復(fù)雜及繁瑣,尤其是對其動(dòng)力學(xué)方面的研究更為困難。而基于有限元方法(FEM)的各種有限元軟件(ANSYS、NASTRAN等)則相對簡單的多,并且被國內(nèi)外廣泛采用。而在有限元分析過程中,每次分析都需要大量的重復(fù)操作,同樣影響到分析效率。此外,通過UG、SOLIDWORKS、PROE等三維軟件建模并導(dǎo)入有限元軟件進(jìn)行分析時(shí),容易使模型受損、產(chǎn)生缺陷,這種情況在模型較復(fù)雜、構(gòu)件相對較多時(shí)顯得尤為明顯。因此本文擬建立一種滾動(dòng)導(dǎo)軌副的參數(shù)化有限元建模方法,希冀通過這一研究,為滾動(dòng)導(dǎo)軌副的動(dòng)、靜態(tài)等分析提供一種高效參數(shù)化分析方法。
本文擬基于大型通用有限元軟件ANSYS,研究滾動(dòng)導(dǎo)軌副的參數(shù)化建模方法。根據(jù)ANSYS提供的參數(shù)化設(shè)計(jì)編程語言APDL,編制滾動(dòng)導(dǎo)軌副參數(shù)化建模程序。本文以南京工藝GGB型滾動(dòng)導(dǎo)軌副為例,研究滾動(dòng)導(dǎo)軌副的參數(shù)化有限元建模方法以及實(shí)際應(yīng)用。
2. APDL參數(shù)化滾動(dòng)導(dǎo)軌副
基于ANSYS參數(shù)化設(shè)計(jì)語言(APDL)編寫的三維有限元建模程序,只需在程序中改變初始設(shè)計(jì)參數(shù)即可實(shí)現(xiàn)不同模型的快速創(chuàng)建,相比GUI(用戶界面操作)方式,效率要高很多,故本文采用APDL建立滾動(dòng)導(dǎo)軌副的有限元模型。
參數(shù)化建模首先需定義模型的材料參數(shù)、單元類型等;其次是定義基本設(shè)計(jì)參數(shù),基于這些參數(shù)建立模型。其中滾動(dòng)導(dǎo)軌副材料采用GCr15軸承鋼,其彈性模量E=2.08×1011Pa,泊松比ν=0.3,密度ρ=7800kg/m3;建模實(shí)體單元使用八節(jié)點(diǎn)單元solid185。
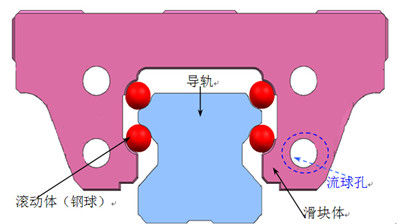
圖1 滾動(dòng)導(dǎo)軌副結(jié)構(gòu)組成
滾動(dòng)導(dǎo)軌副的結(jié)構(gòu)主要包含導(dǎo)軌、滑塊、滾動(dòng)體(鋼球)等,如圖1所示,建模時(shí)對各零件單獨(dú)建模。具體建模過程如下圖2所示。
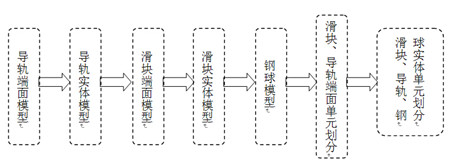
圖2 滾道導(dǎo)軌副建模流程
建模時(shí),第一步是建立導(dǎo)軌端面模型。導(dǎo)軌副端面輪廓主要包含平面、滾道截型、倒角等要素。其中滾道截型由圓弧構(gòu)成,可通過CIRCLE命令得到。結(jié)合導(dǎo)軌幾何特征可知,其端面對稱,故可先建立端面的一半模型,再通過ARSYM命令將其徑向、合并相加可得導(dǎo)軌端面模型,如下圖3所示。
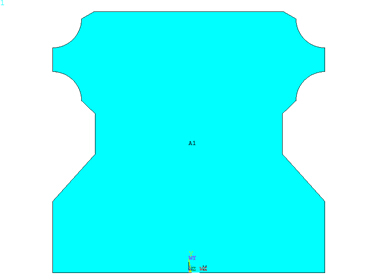
圖3 導(dǎo)軌端面模型
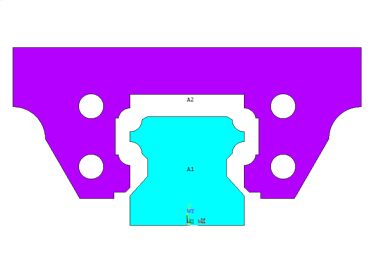
圖4 滑塊端面模型
同樣的方法可得到滑塊端面模型如圖4所示。
進(jìn)而由上述所建端面模型分別進(jìn)行拖拉生成導(dǎo)軌及滑塊實(shí)體模型,可通過命令VEXT實(shí)現(xiàn)。生成導(dǎo)軌及滑塊實(shí)體模型如圖5所示。
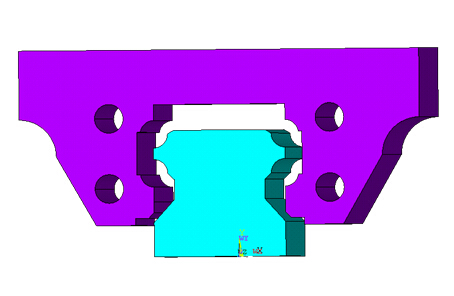
圖5 導(dǎo)軌、滑塊實(shí)體模型
在此基礎(chǔ)上,建立鋼球模型。為方便后續(xù)選擇、約束、加載的實(shí)現(xiàn),通過LOCAL命令在導(dǎo)軌單側(cè)兩滾道的起始處建立局部坐標(biāo)系,并在此坐標(biāo)系下建立鋼球模型。隨后將兩鋼球通過VSYMM命令鏡像復(fù)制,得到導(dǎo)軌另一側(cè)兩條滾道起始處的鋼球模型。隨后,將導(dǎo)軌兩側(cè)四條滾道起始處的四個(gè)鋼球按滑塊長度方向陣列復(fù)制。命令為:
LOCAL,12,x1,y1,z1
WPCSYS,12
SPHERE,sr,,,,
CM,Q1,VOLU
VSYMM,X,Q1
ALLSEL,ALL
CMSEL,S,Q1,VOLU
VGEN,(L/(2*sr)),ALL,,,,,2*sr
……
得到鋼球模型如圖6所示:
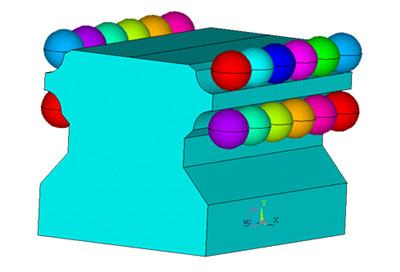
圖6 鋼球?qū)嶓w模型
至此,可得到完整的滾動(dòng)導(dǎo)軌副實(shí)體模型。在實(shí)體模型的基礎(chǔ)上,對其進(jìn)行網(wǎng)格劃分。其中,滑塊及導(dǎo)軌的網(wǎng)格劃分方式為通過MESH200面單元首先對其端面劃分面網(wǎng)格,進(jìn)而通過面網(wǎng)格拖拉生成沿導(dǎo)軌長度規(guī)則分布的網(wǎng)格模型;鋼球網(wǎng)格采用均勻四面體單元。可得到滾動(dòng)導(dǎo)軌副網(wǎng)格模型如圖7所示。
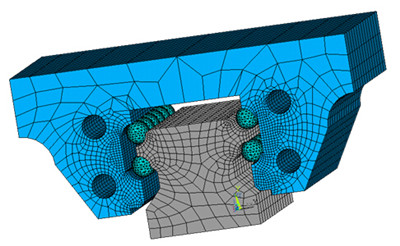
圖7 滾動(dòng)導(dǎo)軌副有限元網(wǎng)格模型
通過上述有限元參數(shù)化建模,即可針對不同的分析而對所建立的有限元模型施加約束條件、載荷、運(yùn)動(dòng)參數(shù)等,在此基礎(chǔ)上根據(jù)分析類型設(shè)置不同的求解選項(xiàng)、迭代參數(shù)等,從而進(jìn)行不同的分析。
3. APDL參數(shù)化有限元分析
基于本文所述建模方法,建立滾動(dòng)導(dǎo)軌副模型,研究其接觸特性。假設(shè)GGB型某滾動(dòng)導(dǎo)軌副主要結(jié)構(gòu)參數(shù)如下表1所示,表中各符號(hào)含義如圖8所示。
表1 GGB型主要APDL結(jié)構(gòu)參數(shù)
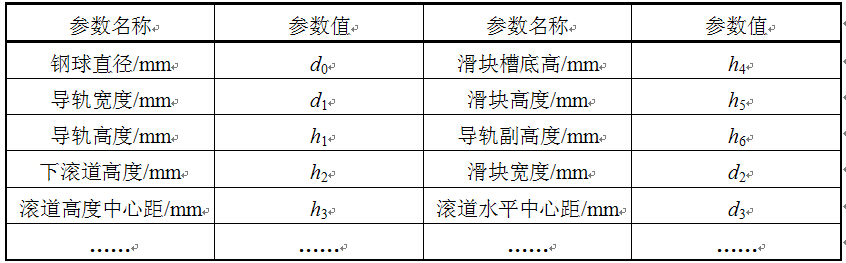
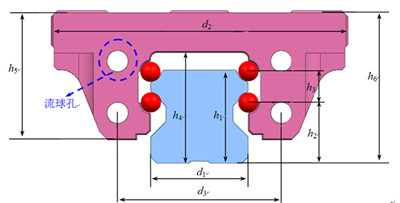
圖8 滾動(dòng)導(dǎo)軌副建模參數(shù)示意圖
根據(jù)表1參數(shù)及圖8示意圖建立GGB型滾動(dòng)導(dǎo)軌副有限元模型,分析滾動(dòng)導(dǎo)軌副流球孔位置(即d3)對其接觸特性的影響。
因此對滾動(dòng)導(dǎo)軌副進(jìn)行接觸分析,在所建模型的基礎(chǔ)上,定義接觸對。接觸單元選擇CONTA174單元,目標(biāo)單元選擇TARGE170單元,并設(shè)置其剛度系數(shù)、穿透容差等接觸對單元實(shí)常數(shù)。定義好的接觸對單元如下圖9所示。
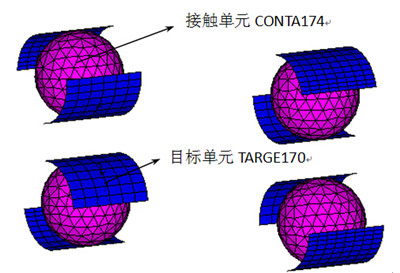
圖9 滾動(dòng)導(dǎo)軌副接觸對單元
設(shè)置好接觸參數(shù)以后,即可對模型施加約束及載荷條件。本文工況以導(dǎo)軌底面固定為約束、滑塊頂面分布均布載荷。約束及載荷如圖10所示。
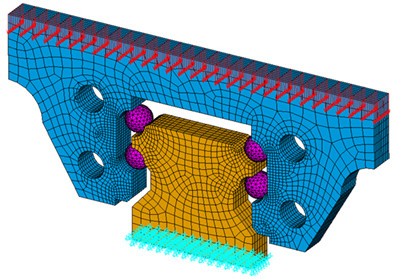
圖10 滾動(dòng)導(dǎo)軌副約束及載荷施加
進(jìn)而即可設(shè)置求解選項(xiàng),包括迭代參數(shù)、結(jié)果輸出形式、求解器的選擇等。求解得到表1參數(shù)下的GGB型滾動(dòng)導(dǎo)軌副最大應(yīng)力,如圖11所示。
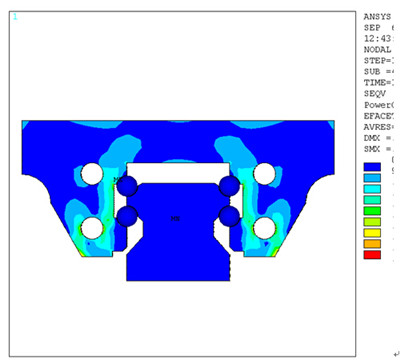
圖11 工況下GGB型滾動(dòng)導(dǎo)軌副接觸應(yīng)力云圖
在此基礎(chǔ)上,分別對流球孔位置d3分別改變不同位置進(jìn)行接觸分析,分析流球孔對滾動(dòng)導(dǎo)軌副接觸特性的影響。經(jīng)分析并整理數(shù)據(jù)可得到流球孔位置d3與最大接觸應(yīng)力的關(guān)系圖如下圖12所示。
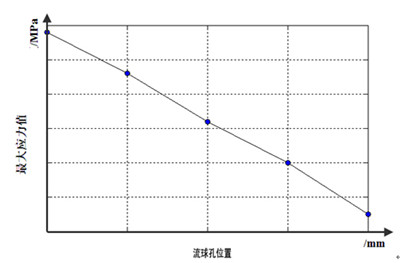
圖12 最大應(yīng)力與流球孔位置的關(guān)系
可見流球孔位置d3越大,最大接觸應(yīng)力越小。
4.結(jié)論
本文給出了一種滾動(dòng)導(dǎo)軌副參數(shù)化有限元設(shè)計(jì)分析方法,結(jié)果表明:
(1)本文參數(shù)化建模方法建立滾動(dòng)導(dǎo)軌副有限元模型,只需修改幾個(gè)建模基本參數(shù),即可完成有限元建模,極大的提高了分析設(shè)計(jì)效率,節(jié)省了大量重復(fù)工作時(shí)間。
(2)基于該方法所建有限元模型,只需要施加約束、載荷等工況條件,求解選項(xiàng),即可實(shí)現(xiàn)多種分析目的,包括:靜力學(xué)分析、動(dòng)力學(xué)分析、振動(dòng)特性(模態(tài))分析、拓?fù)浣Y(jié)構(gòu)優(yōu)化等分析。
(3)基于本文所述方法建立的GGB型滾動(dòng)導(dǎo)軌副模型,其流球孔位置對其最大接觸應(yīng)力有明顯的影響。
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com

查")
- 2025年6月 新能源汽車銷量情況
- 2025年6月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年6月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年6月 軸承出口情況
- 2025年6月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年6月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況
- 機(jī)械加工過程圖示
- 判斷一臺(tái)加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢
- 國產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時(shí)代,少談點(diǎn)智造,多談點(diǎn)制造
- 現(xiàn)實(shí)面前,國人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計(jì)
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別